In robotics, controlling how fast a motor spins or how bright an LED shines is essential. PWM — Pulse Width Modulation — is the tool that makes this possible.
Let’s dive into what PWM is, how it works, and how you can use it in your own robotic projects.
🔍 What is a PWM?
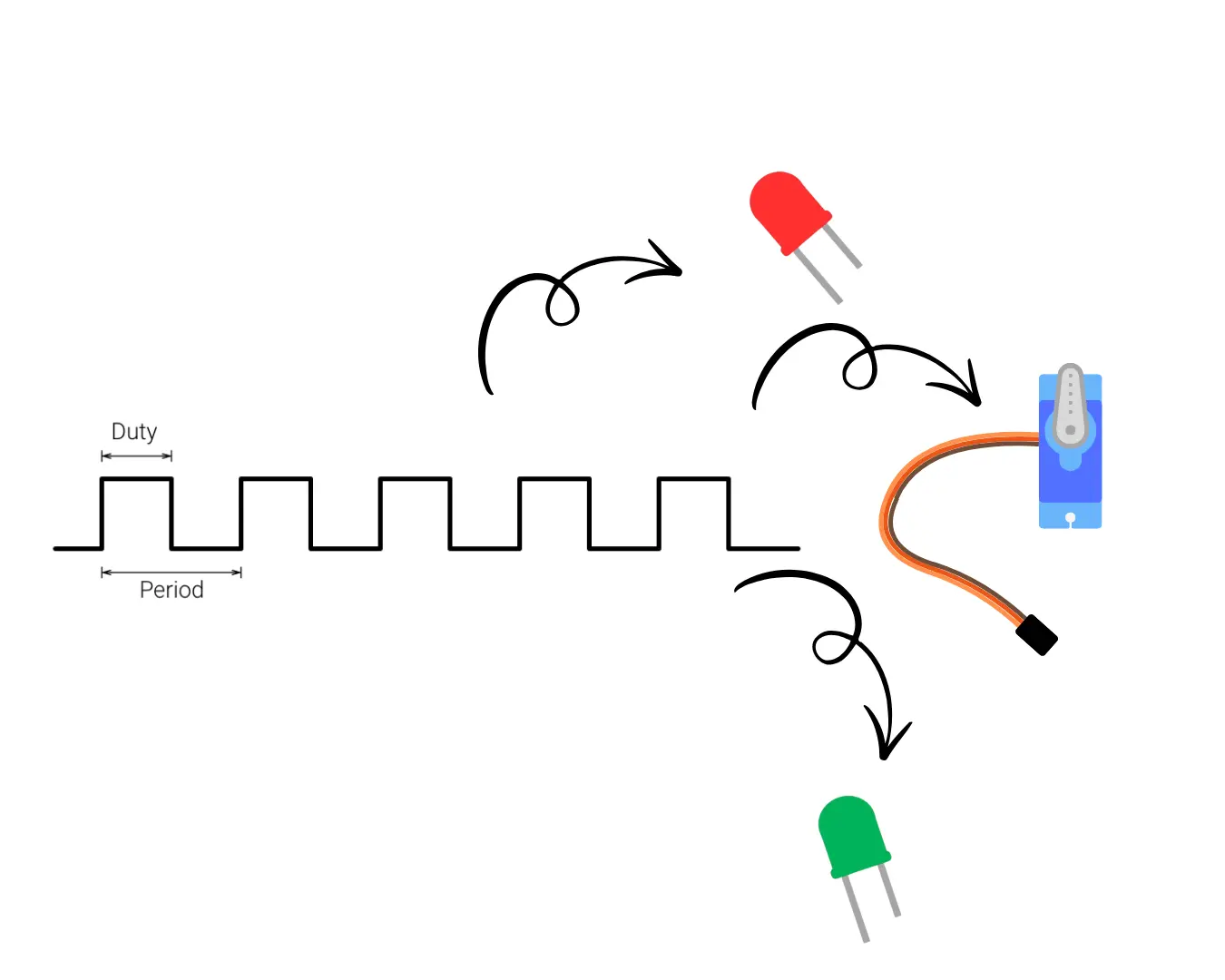
PWM is a technique to simulate analog output using digital signals. Instead of sending a fixed voltage, you rapidly switch the signal on and off at a specific frequency.
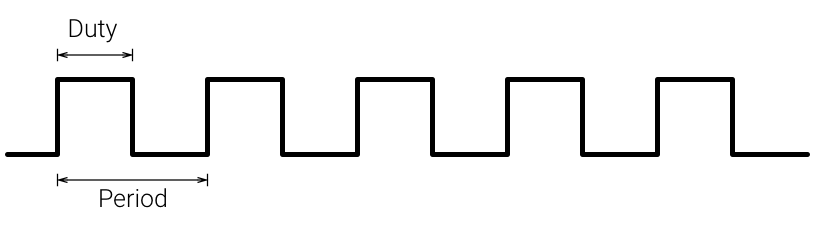
The key concept is the duty cycle, which is the percentage of time the signal stays high during each cycle.
📑 How it Works
Think of PWM like flipping a light switch really fast:
If it’s ON half the time, it looks like half brightness.
If it’s ON most of the time, it looks brighter.
The faster the switch (higher frequency), the smoother the perceived output.
🧮 How to Calculate PWM
📐 Formula
The duty cycle is calculated with:
Duty Cycle (%) = (TON / T) * 100
Where:
TON = Time the signal is HIGH
T = Total period of one PWM cycle (HIGH + LOW)
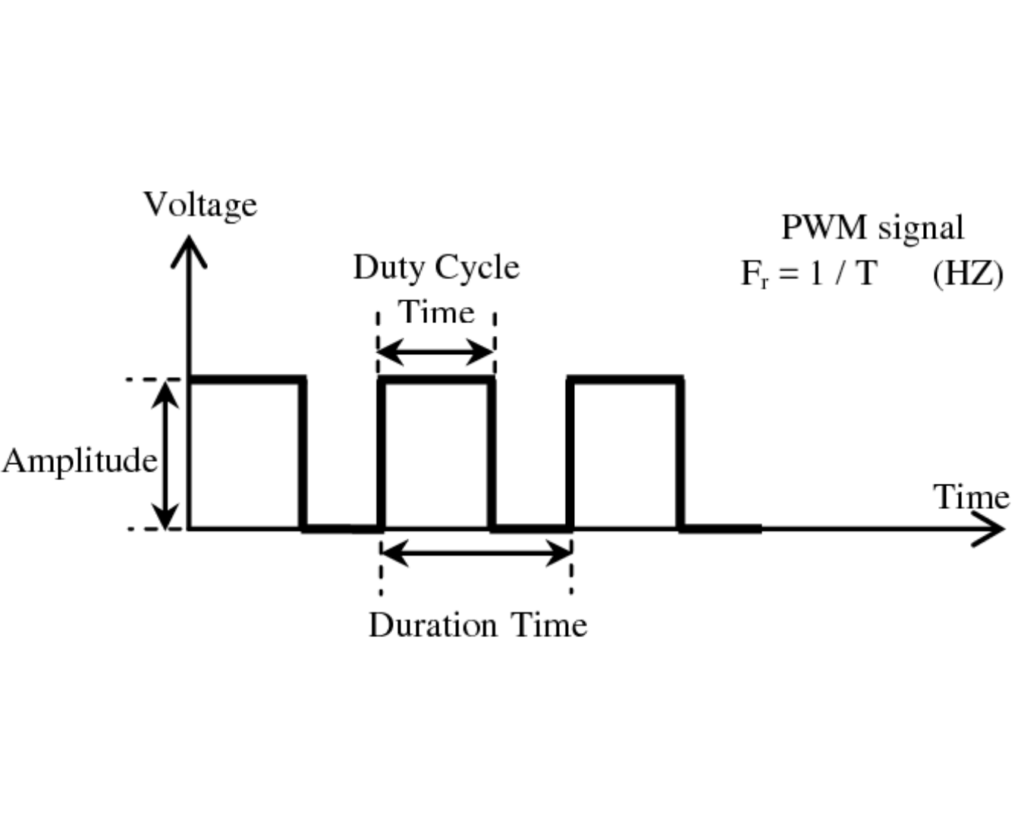
The frequency of the PWM signal is:
Frequency (Hz) = 1 / T
🤖 PWM in Robotics
PWM is everywhere in robotic systems. Here are some of the most common use cases:
🌀 Motor Control
Control how fast your DC motors spin.
🎚 Servo Positioning
Servos use PWM where the pulse width determines the angle.
💡 LED Brightness
Dimming LEDs with PWM is energy-efficient and simple.
Discover BumperBot Kit
Assemble your robot and get started to learn Robotics!