Navigazione waypoint ROS2 con ripianificazione dinamica tramite Nav2
Linux, Nav2, ROS 2, Tutorials
In this tutorial, you’ll learn how to implement waypoint-based navigation in ROS2 using the Nav2 stack, enhanced with dynamic replanning capabilities. This setup enables your robot to follow a sequence of predefined goals and recalculate the path if unexpected obstacles appear. It’s ideal for autonomous patrol or area coverage in indoor environments.
📝 Requirements
– ROS2 Humble or Foxy installed – Nav2 stack (`nav2_bringup`) configured – A robot simulation (e.g., TurtleBot3 in Gazebo) – Pre-built map and AMCL localization – RViz installed for interaction
Step 1: Define Waypoints
Create a list of waypoints in a YAML file with the format expected by `FollowWaypoints` behavior. Each waypoint should include a position (x, y) and orientation (quaternion z, w).
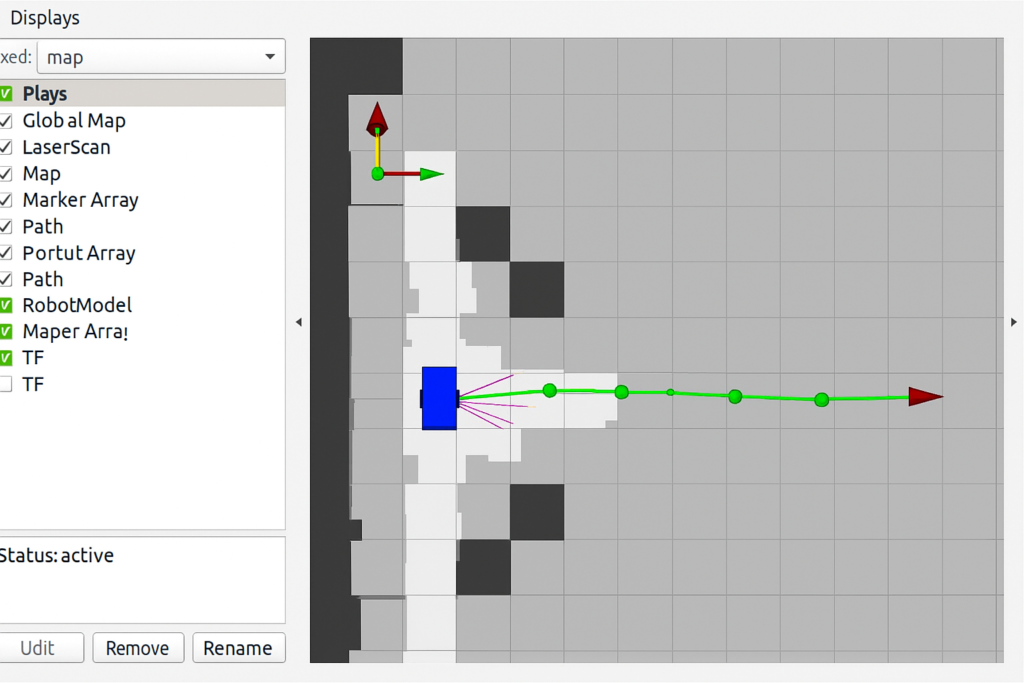
Launch your standard Nav2 bringup with the robot localized on a known map. Then use a script or custom node to load the YAML and publish goals sequentially to `FollowWaypoints` action server.
Step 3: Enable Dynamic Replanning
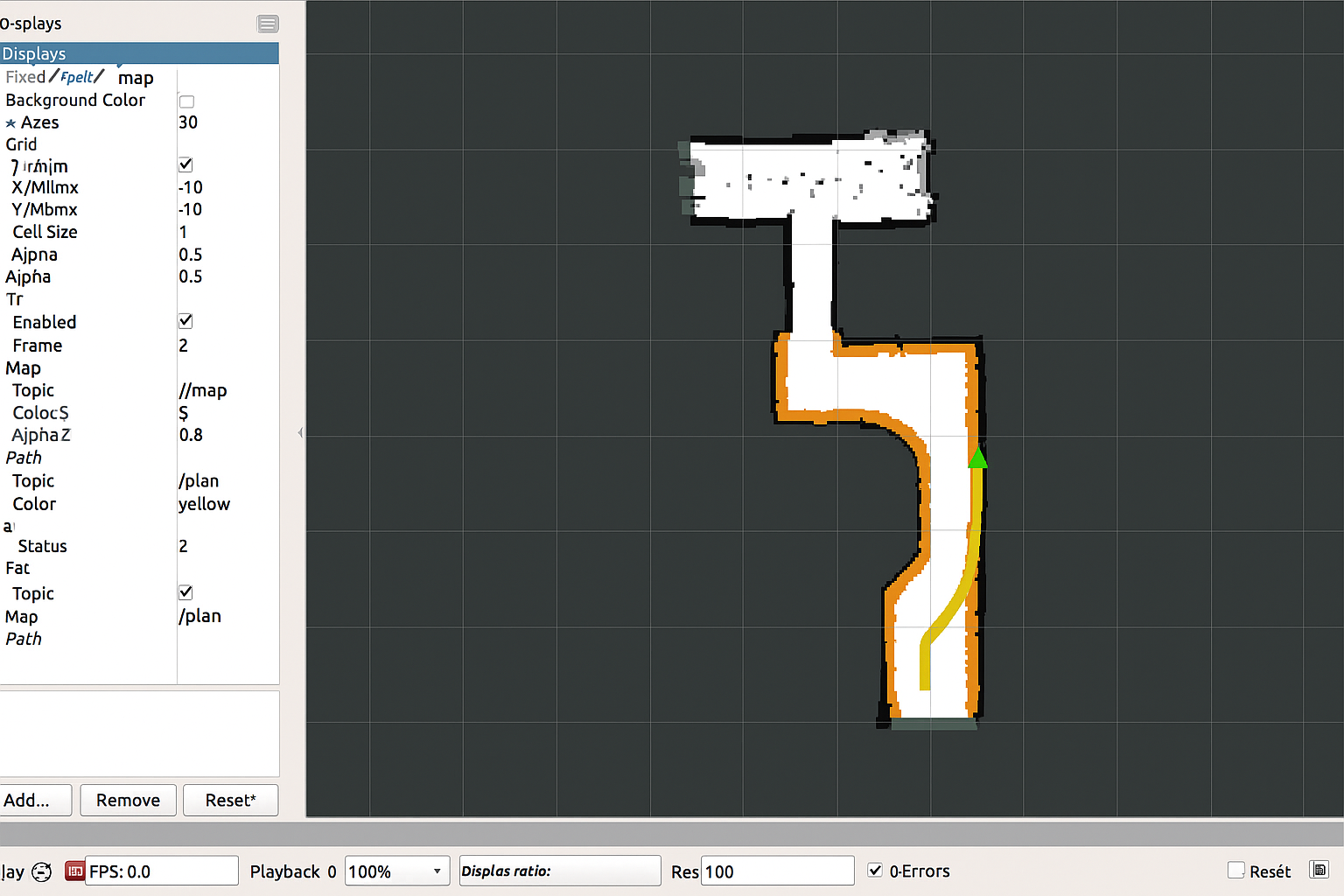
To ensure the robot adapts to unexpected obstacles, activate recovery and planner plugins. Make sure your `planner_server` has recovery behaviors like `Spin`, `ClearCostmap`, and the controller allows replanning.
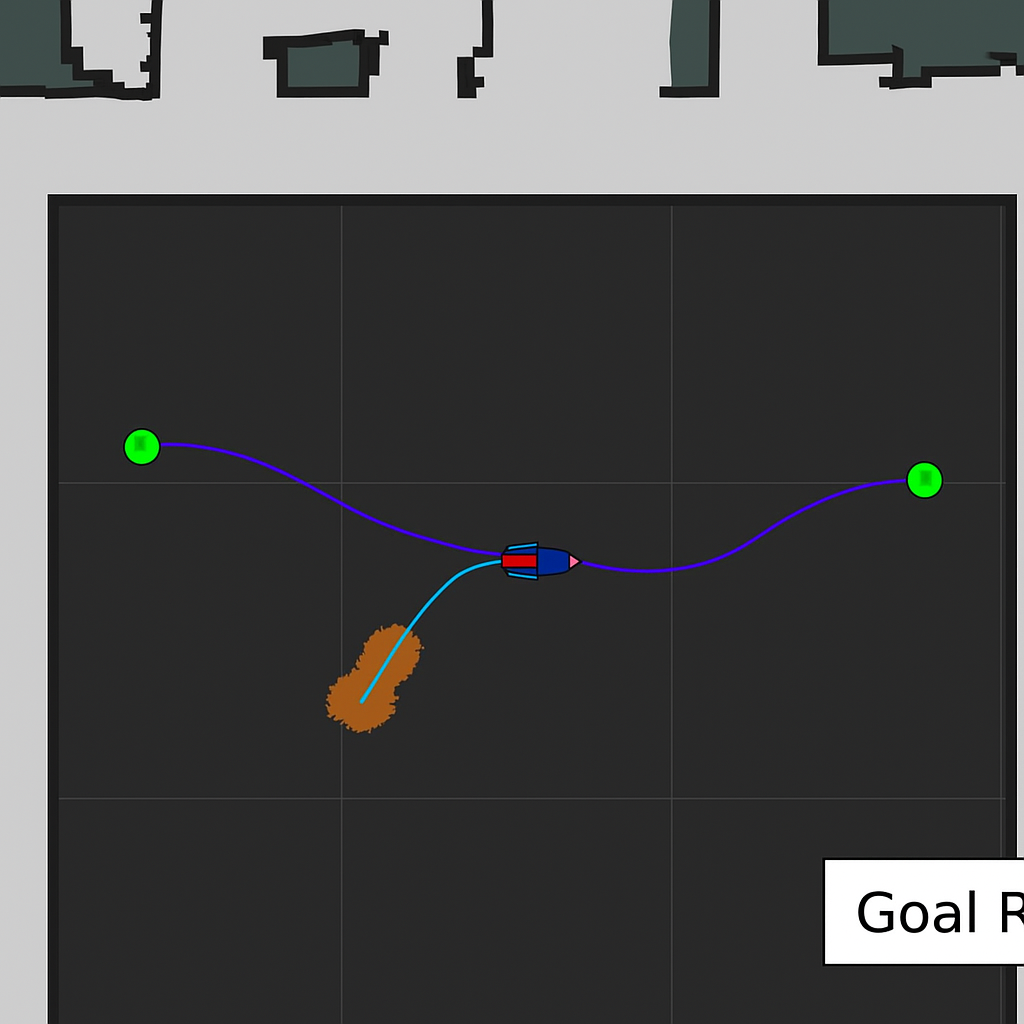
Place a dynamic obstacle (e.g., a box) in the robot’s path during navigation. Nav2 should replan or attempt a recovery behavior and continue toward the next waypoint. Observe transitions in RViz and logs.
🛠️Step 5: Troubleshooting
– Waypoints not loading:
check YAML structure and action interface. – Robot doesn’treplan: verify recovery plugins are configured and active. – Navigation freezes:
look at BT logs and verify conditions for fallback nodes. – Path too close to obstacle:
adjust inflation and costmap parameters.
Want to learn more?
You can find a detailed explaination of the autonomous navigation in the "Self Driving and ROS - Learn by Doing! Odometry and Control" course