In this tutorial, you will learn how to build a 2D map of an environment using the GMapping SLAM algorithm in ROS1. This process is fundamental for autonomous navigation as it allows the robot to understand and represent its surroundings.
📝 Requirements
– ROS1 installed (e.g., Noetic) – `slam_gmapping` package – Simulated robot with LIDAR sensor (e.g., TurtleBot3 in Gazebo) – RViz installed for visualization
Step 1: Launch the GMapping Node
Launch the SLAM node with the following command:
rosrungmappingslam_gmappingscan:=/scan
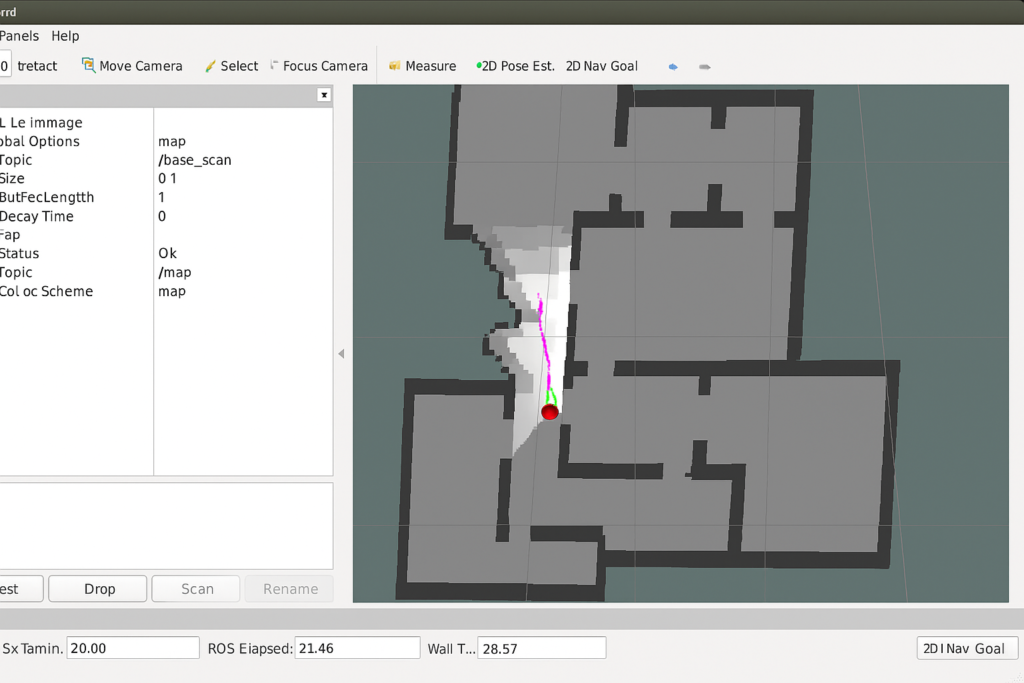
🖥️Step 2: Move the Robot to Explore
To generate a meaningful map, the robot needs to explore the environment. You can use keyboard teleoperation with: