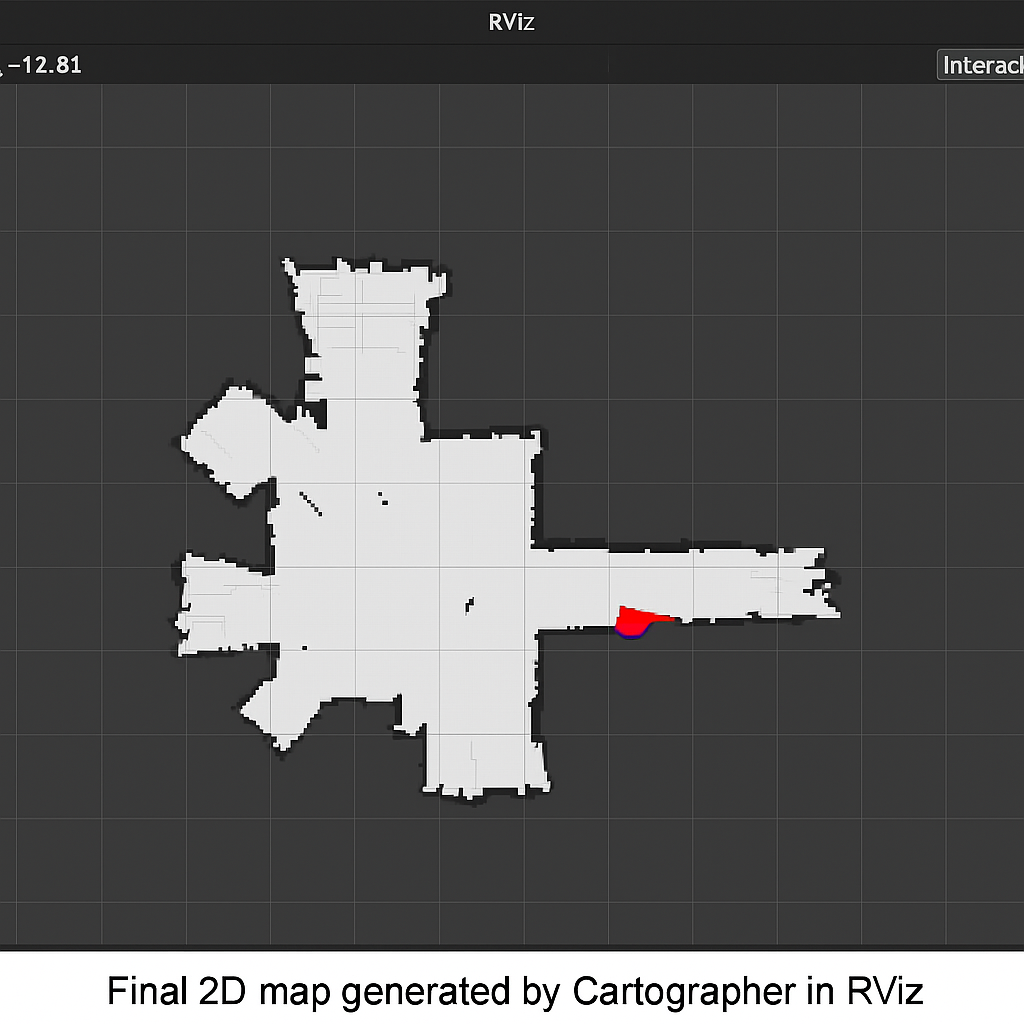
In this tutorial, you’ll learn how to use Google’s Cartographer with ROS2 to perform advanced 2D SLAM (Simultaneous Localization and Mapping). Cartographer is a real-time SLAM algorithm that provides loop closure and accurate map construction in dynamic environments. We’ll use a simulated TurtleBot3, but the steps are adaptable to real robots.
📝 Requirements
– ROS2 installed (e.g., Humble or Foxy) – `cartographer_ros` installed and built in your workspace – A robot simulation (e.g., TurtleBot3 in Gazebo) – LIDAR sensor publishing on `/scan` – TF tree properly set up between `base_link`, `odom`, and `laser`
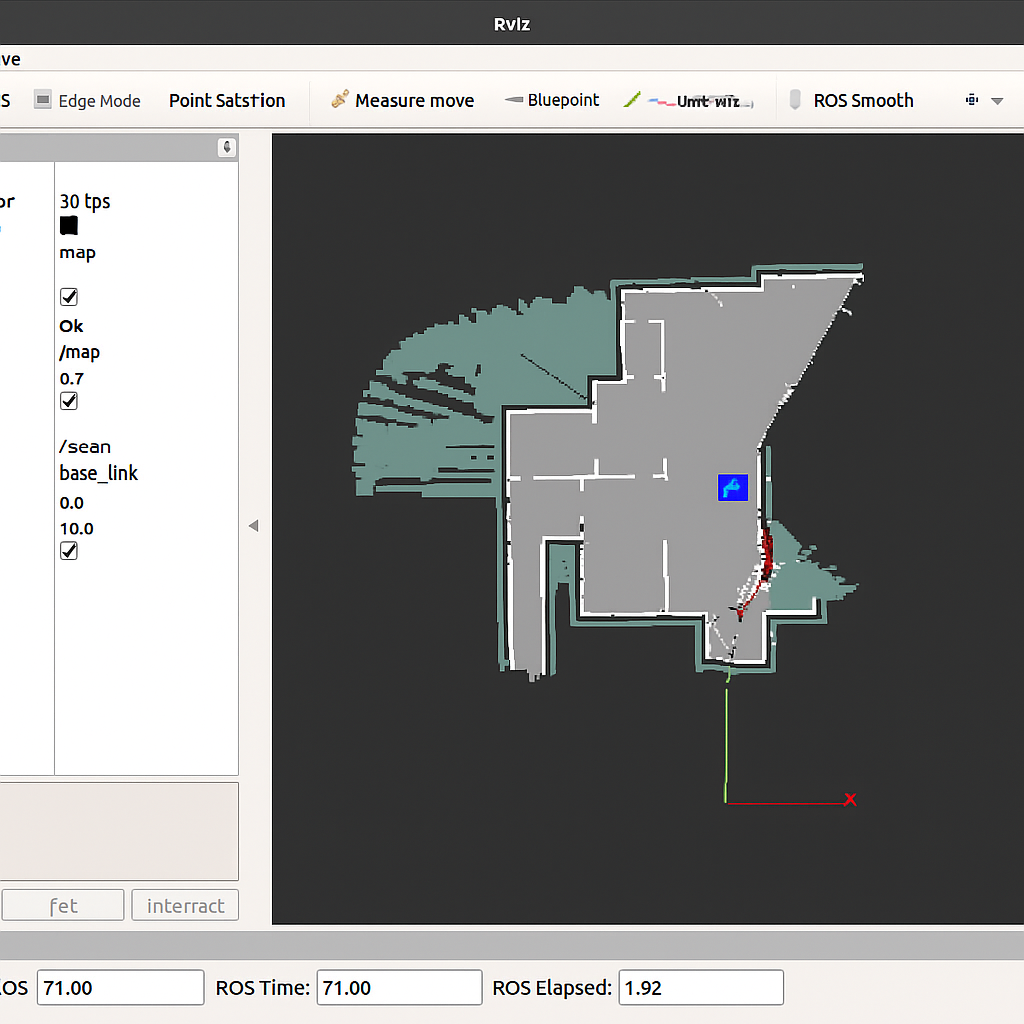
Step 1: Launch Simulation and Cartographer
Start the robot simulation and the Cartographer SLAM launch file. Example with TurtleBot3: