 What Are Behavior Trees?
What Are Behavior Trees?Behavior Trees (BTs) originated in game development, but quickly became a favorite in robotics because of their flexibility and readability. They allow us to compose logic in a structured way using nodes that are easy to understand, reuse, and extend.
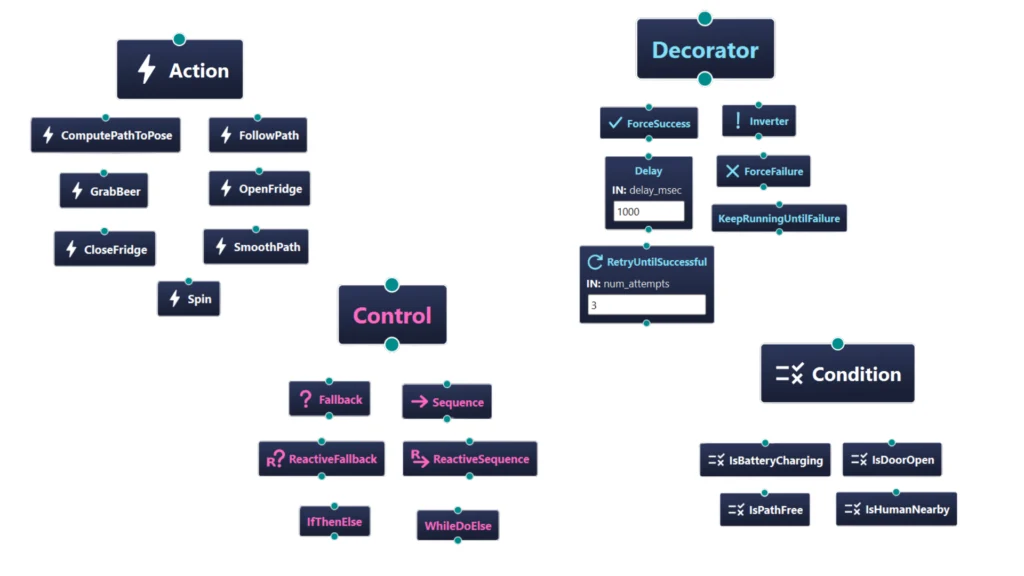
A Behavior Tree is composed of:
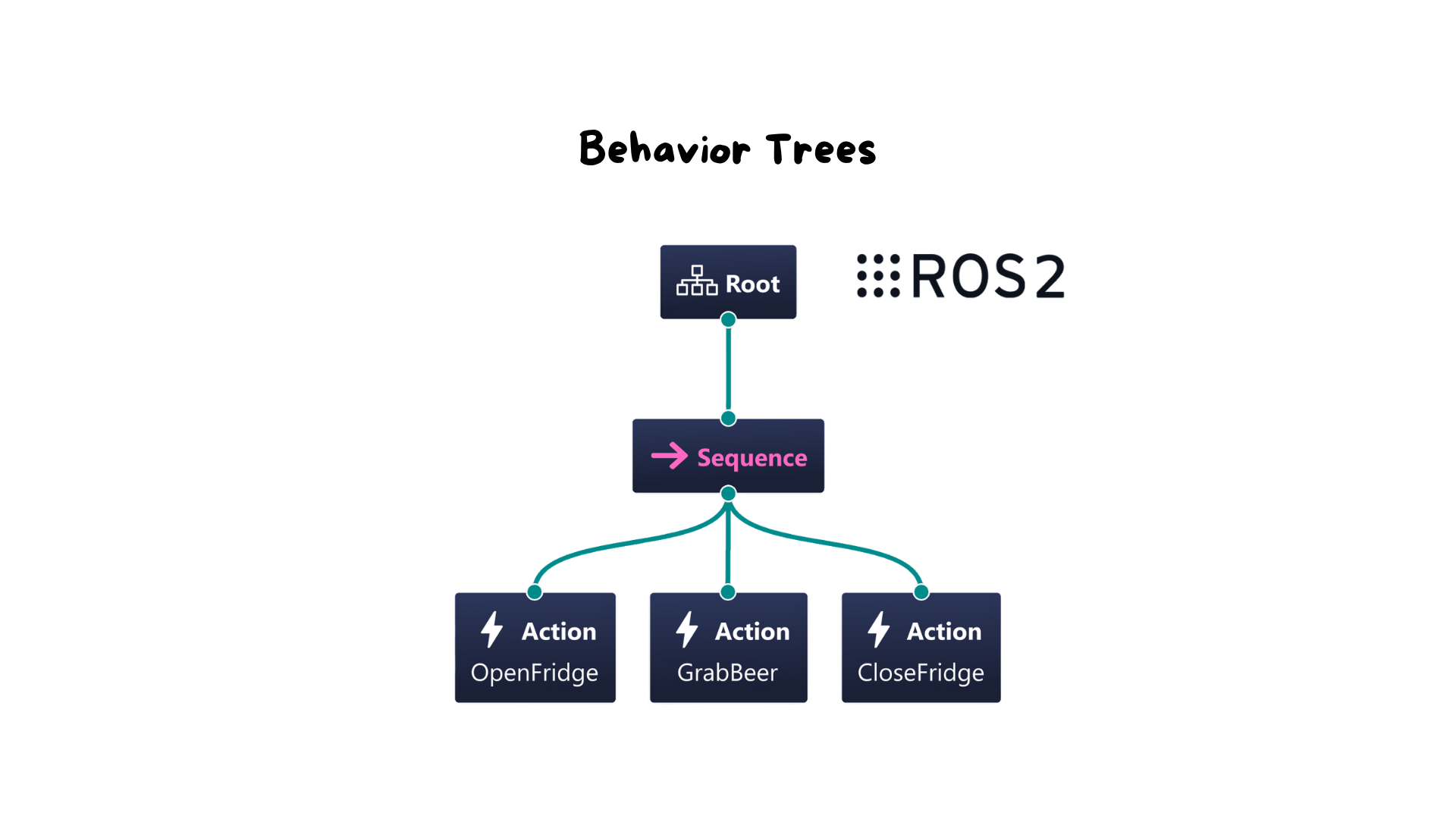
Action Nodes: they perform tasks
Condition Nodes: they check the state of the world
Control Nodes: they decide how to organize children (e.g., Sequence, Fallback)
Decorator Nodes: they modify the behavior of a single child (e.g., Retry, ForceFailure)
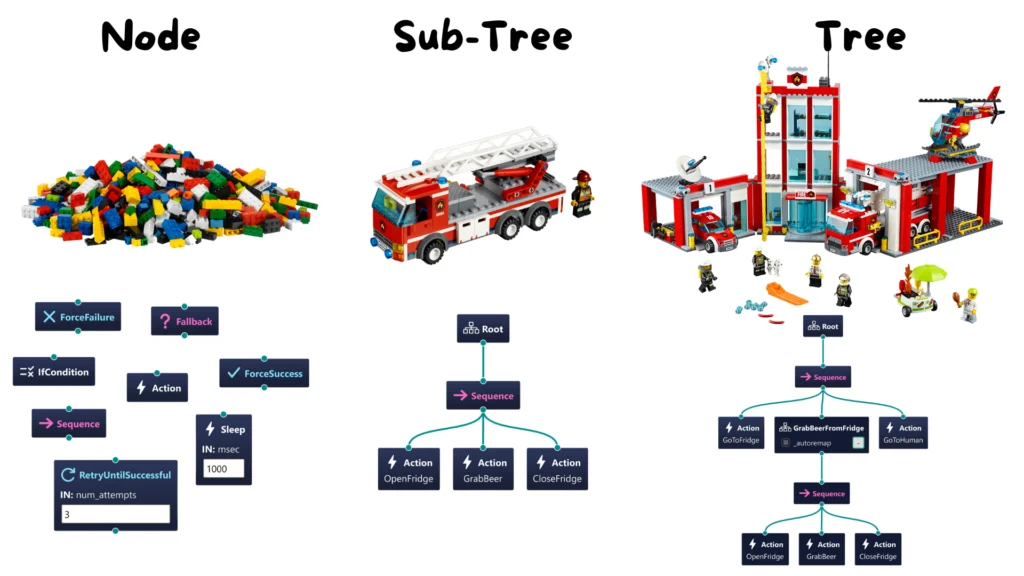
Like LEGO bricks, you can combine these nodes to build behavior that is both powerful and modular.