3. Launch the Local Flask Server
Make sure your Flask server is running on the port you specified with ngrok (e.g., port 5000).
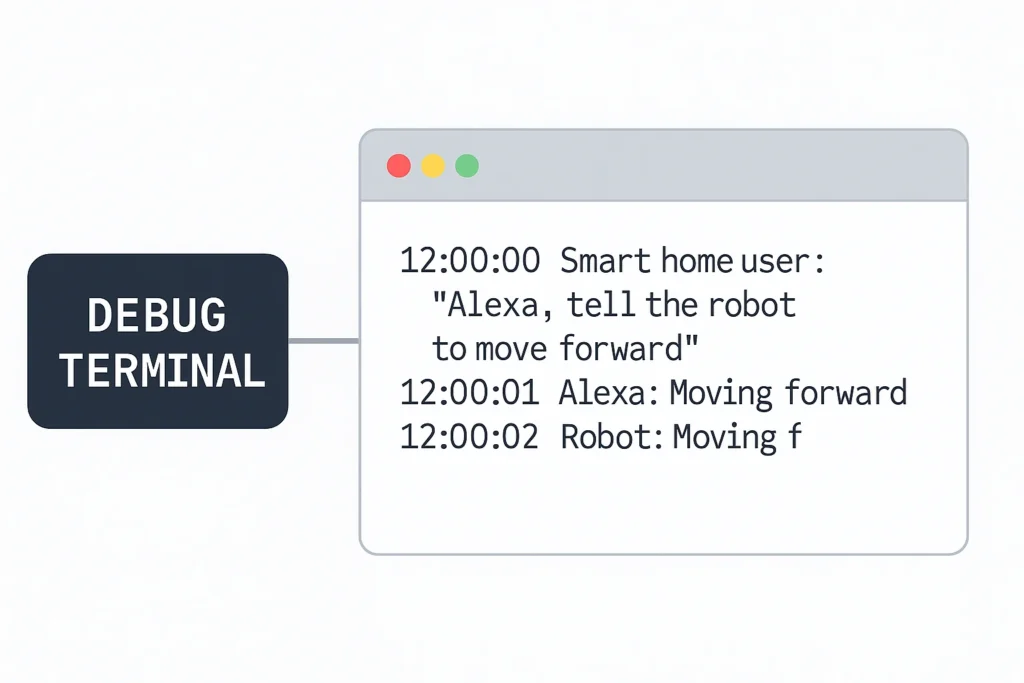
The server should be capable of parsing Alexa’s JSON requests, identifying the intent, and triggering the appropriate ROS 2 action or log message.
Start it with:
`python3 alexa_server.py`
Ensure ROS 2 and the robot nodes are also running, so the server can communicate with them.