
Choosing the Right Locomotion System for Mobile Robots
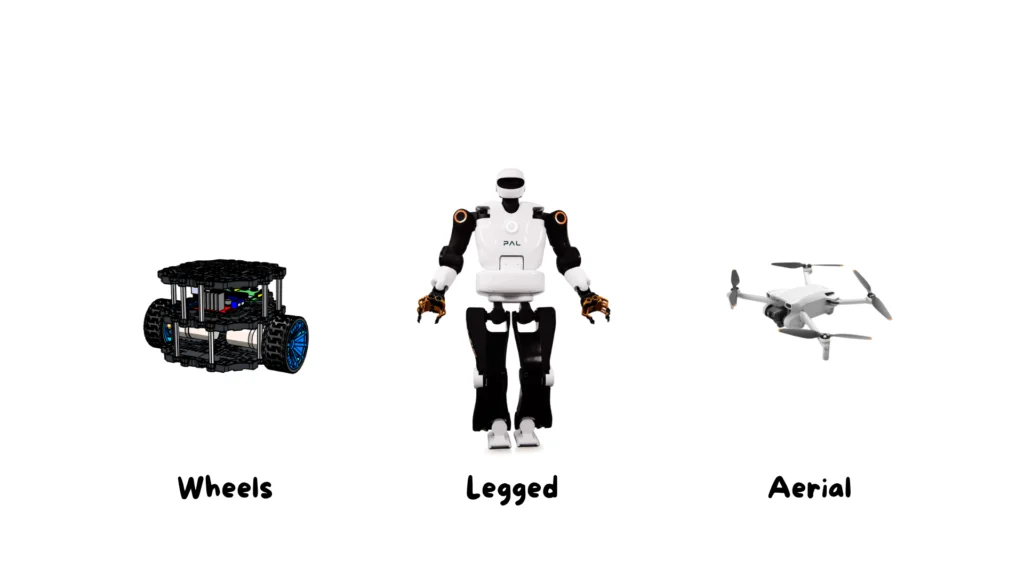
Whether it’s a four-legged robot climbing rocky hills or a drone hovering over a building site, locomotion is what gives mobile robots the power to explore, navigate, and interact with the world. But what makes one locomotion system better than another? Is there a perfect design? The answer is more nuanced than you might think. […]
Creating a 2D map with GMapping (ROS)
In this tutorial, you will learn how to build a 2D map of an environment using the GMapping SLAM algorithm in ROS1. This process is fundamental for autonomous navigation as it allows the robot to understand and represent its surroundings. 📝 Requirements – ROS1 installed (e.g., Noetic) – `slam_gmapping` package – Simulated robot with LIDAR sensor (e.g., […]
Understanding PWM in Robotics
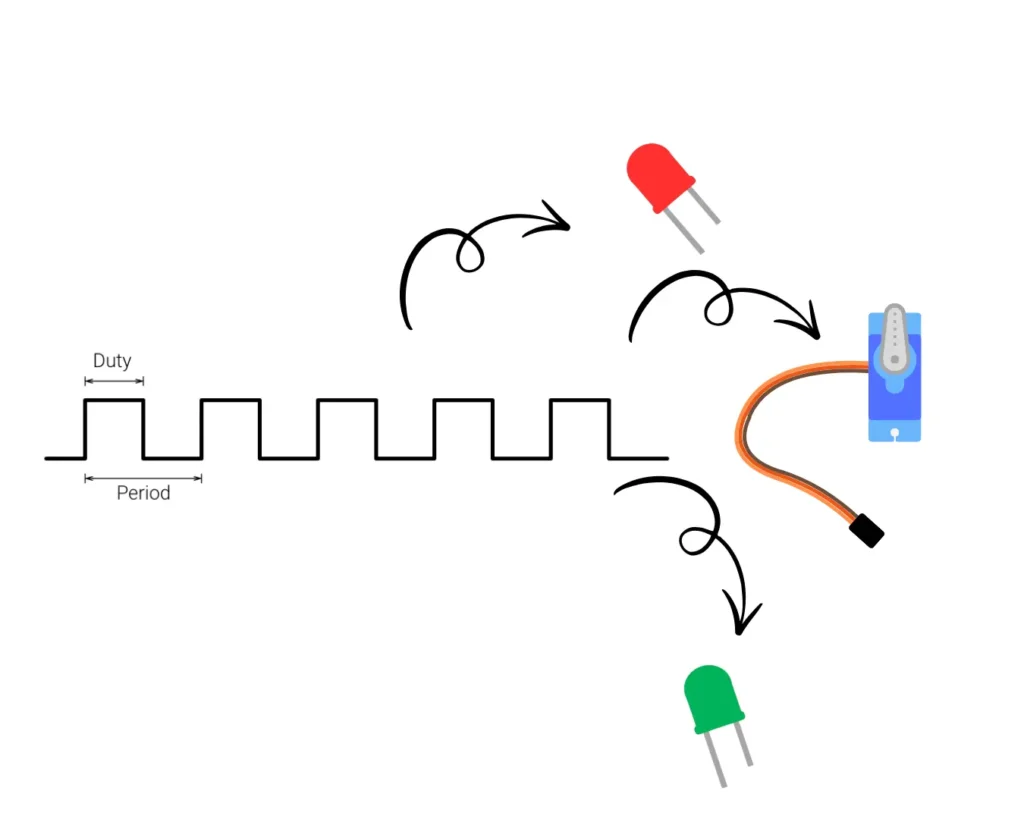
In robotics, controlling how fast a motor spins or how bright an LED shines is essential. PWM — Pulse Width Modulation — is the tool that makes this possible. Let’s dive into what PWM is, how it works, and how you can use it in your own robotic projects. 🔍 What is a PWM? PWM […]
Navigation with move_base and AMCL (ROS)
In this tutorial, you will learn how to autonomously navigate a mobile robot in ROS1 using the `move_base` package for path planning and `amcl` for probabilistic localization on a prebuilt map. We will use a simulated robot (e.g., TurtleBot3) with a map previously generated using SLAM. 📝 Required components ROS1 installed (e.g., Noetic on Ubuntu […]
How to create a simple Subscriber Node with C++ – ROS2
In this tutorial, we’ll create a simple ROS 2 node in C++ that subscribes to a topic and listens for messages published on it. If you haven’t checked out the simple publisher tutorial, I recommend starting there first. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), software is organized […]
How to use i2c lcd with Arduino
In this tutorial, you’ll learn how to use a 16×2 LCD display with an I2C interface using the Adafruit_LiquidCrystal library. The code example shows how to display a counter that increments every second and blinks the backlight to create a visual effect. What is an I2C LCD Display? When working with LCD screens and microcontrollers […]
How to use humidity sensor with Arduino
In this tutorial, you will learn how to use a basic analog soil moisture sensor with an Arduino Uno to measure soil humidity. Instead of using a digital humidity sensor, we will power the analog sensor selectively to reduce corrosion, read the moisture level, and visually represent it using 5 LEDs ranging from dry to […]
How to create a simple Publisher Node with Python – ROS2

In this guide, we’ll build a simple publisher node using Python in ROS2.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]
How to use 16×2 lcd display with arduino

In this tutorial, we will explore advanced functionalities of a standard 16×2 character LCD with an Arduino Uno, including custom characters, contrast control, and backlight management. 📝 Required components Arduino Uno 16×2 Character LCD (HD44780-based) Potentiometer (10kΩ) for contrast 220Ω resistor (for backlight) Breadboard Jumper wires Step 1: Wiring the Electronics 1 Connect VSS to […]
How to create a simple Publisher Node with C++ – ROS2

In this tutorial, we’ll learn how to create a simple ROS2 node using C++ that sends text messages to a topic.This is one of the fundamental skills in the ROS2 ecosystem — allowing different programs (called nodes) to talk to each other via topics. 🔍 What is a ROS Node and a Topic? In ROS […]