
YUMI Smart Pi One: a compact SBC that surprises with completeness and usability

The world of Single Board Computers is crowded, but only a few boards truly stand out. Some aim for raw power, others for aggressive pricing. The YUMI Smart Pi One takes a third route: it doesn’t try to be a performance monster, but rather a compact device, rich in ports, easy to configure, and backed […]
How to Build and Test a ROS 2 Service Client in C++
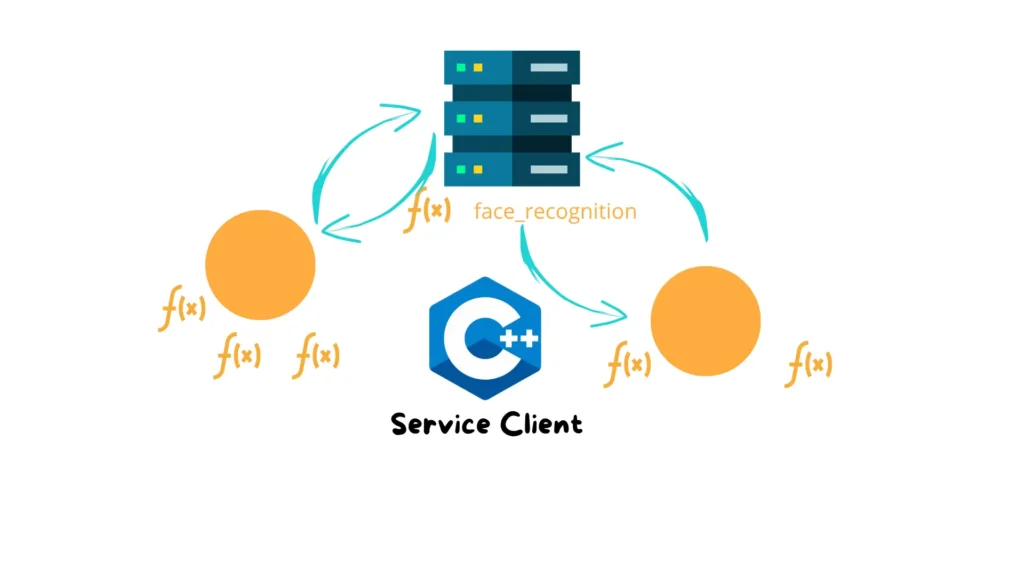
In the previous tutorial, we learned how to build a ROS 2 Service Server that takes two integers and returns their sum.Now it’s time to create the client node that sends requests to that service — this time, using C++. This tutorial will guide you through: Understanding how a ROS 2 service client works. Implementing […]
How to Build and Test a ROS 2 Service Client in Python
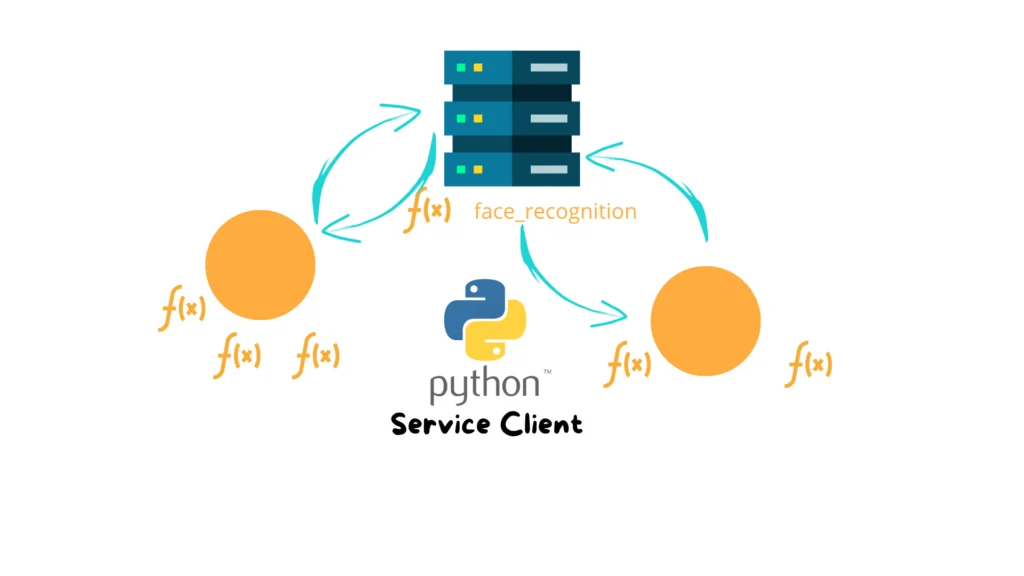
In the previous tutorial, we built a simple ROS 2 service server that takes two integers and returns their sum. Now it’s time to create a Python client node that uses this service and communicates with the server to request the calculation. 🤔 What’s a ROS 2 Service Client? A service client is a node […]
How to Build and Test a ROS 2 Service Server in C++
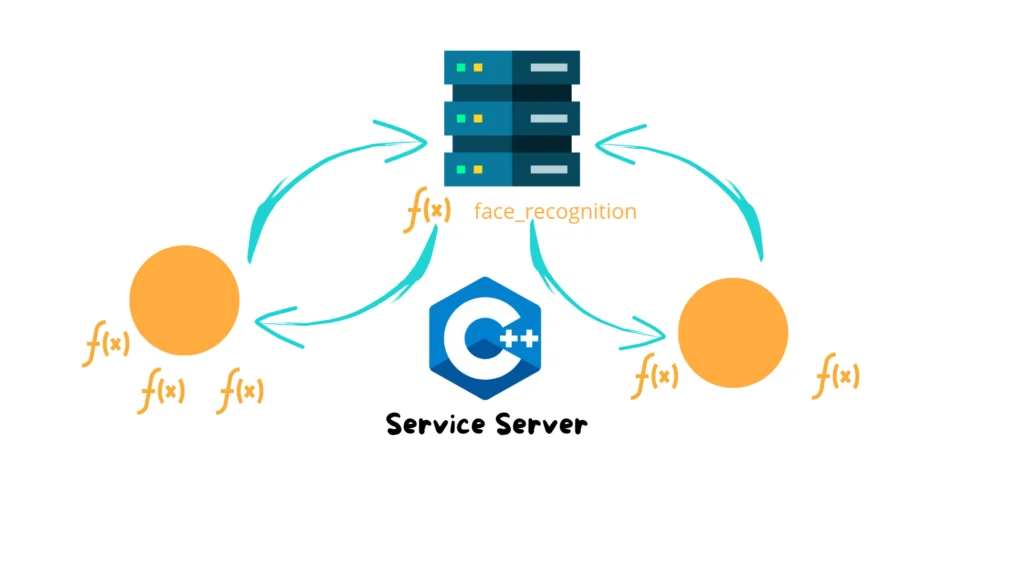
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
How to Build and Test a ROS 2 Service Server in Python
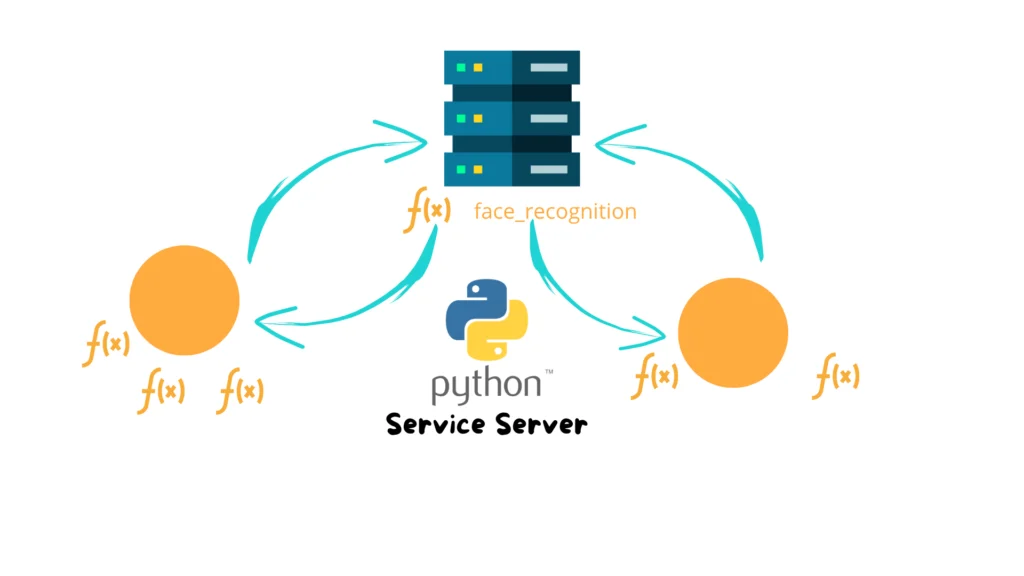
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
Install Ubuntu 22.04 on a Virtual Machine with VirtualBox

If you’re new to Linux or want to explore Ubuntu without modifying your main operating system, a Virtual Machine (VM) is the perfect solution. This guide will walk you through installing Ubuntu 22.04 inside Oracle VM VirtualBox. You’ll learn how to set it up safely, efficiently, and without needing to dual-boot your system. Whether you’re […]
Smarter Path Planning in ROS 2: Implementing A* in Python
In the world of robotics, planning a path from one point to another isn’t just about finding a route—it’s about doing it intelligently. If you’ve ever implemented Dijkstra’s algorithm, you know how powerful it is… but also how slow it can be when the map gets big. What if we could be smarter? What if […]
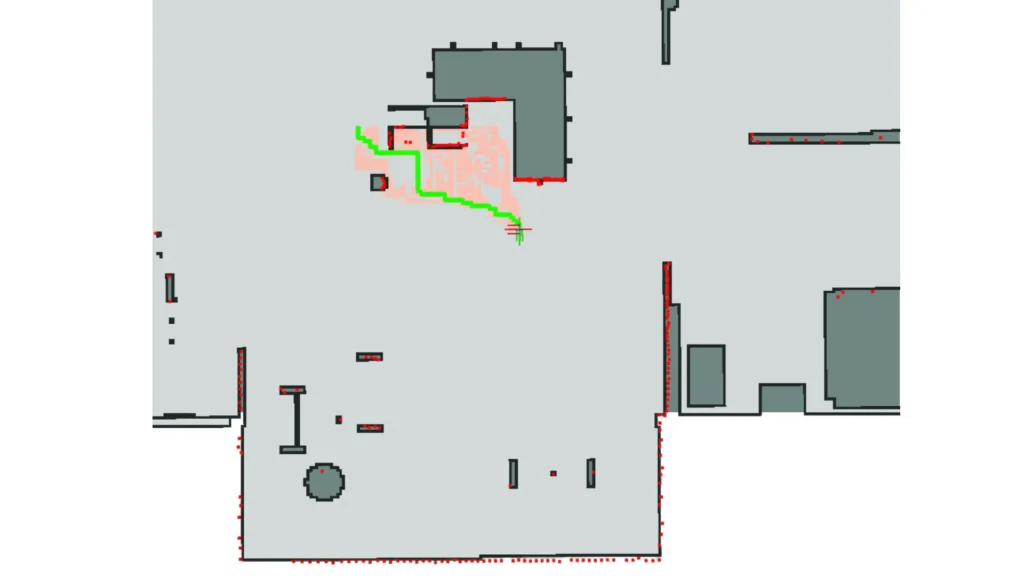
Navigazione waypoint ROS2 con ripianificazione dinamica tramite Nav2
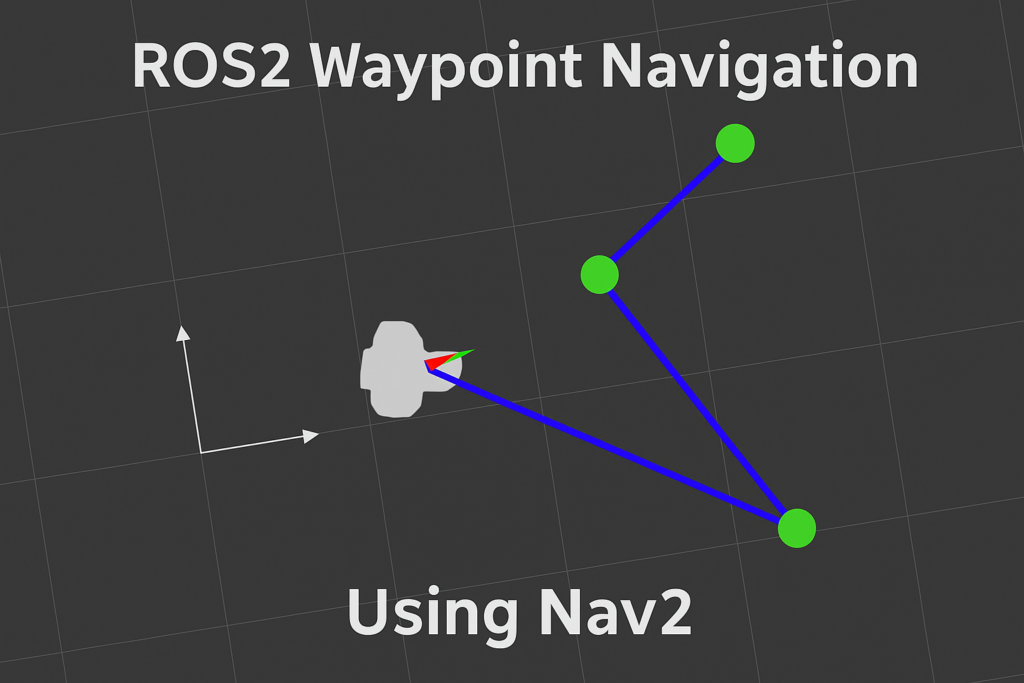
In this tutorial, you’ll learn how to implement waypoint-based navigation in ROS2 using the Nav2 stack, enhanced with dynamic replanning capabilities. This setup enables your robot to follow a sequence of predefined goals and recalculate the path if unexpected obstacles appear. It’s ideal for autonomous patrol or area coverage in indoor environments. 📝 Requirements – […]
Advanced SLAM in ROS2: Mapping with Cartographer
In this tutorial, you’ll learn how to use Google’s Cartographer with ROS2 to perform advanced 2D SLAM (Simultaneous Localization and Mapping). Cartographer is a real-time SLAM algorithm that provides loop closure and accurate map construction in dynamic environments. We’ll use a simulated TurtleBot3, but the steps are adaptable to real robots. 📝 Requirements – ROS2 […]
Autonomous Navigation in ROS2 with Nav2 and Behavior Tree
In this tutorial, you will learn how to perform autonomous navigation in ROS2 using the Nav2 stack with integrated Behavior Trees (BT). The Nav2 framework provides a powerful modular system that allows robots to navigate in a known map using planning, localization, and behavior control components. 📝 Requirements – ROS2 installed (e.g., Humble or Foxy) – […]