
Controlador Pure Pursuit
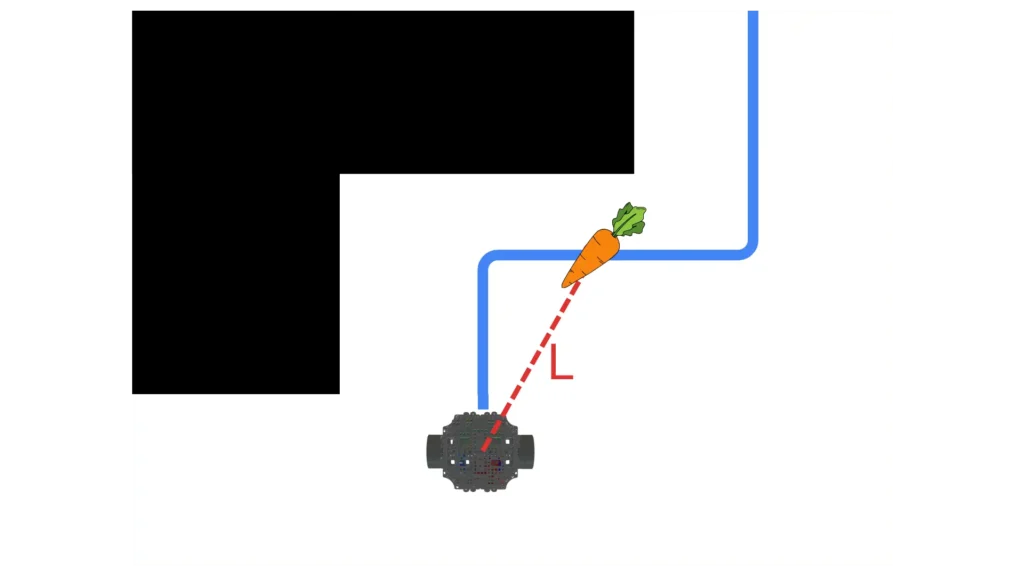
Introduction to Motion Planning Motion planning is a core component of autonomous robots that deals with finding and following a path for the robot to reach a goal safely. High-level (global) motion planners typically compute a static path through the environment, but real robots operate in dynamic environments where obstacles or conditions can change rapidly. […]
Mapeo con slam_toolbox
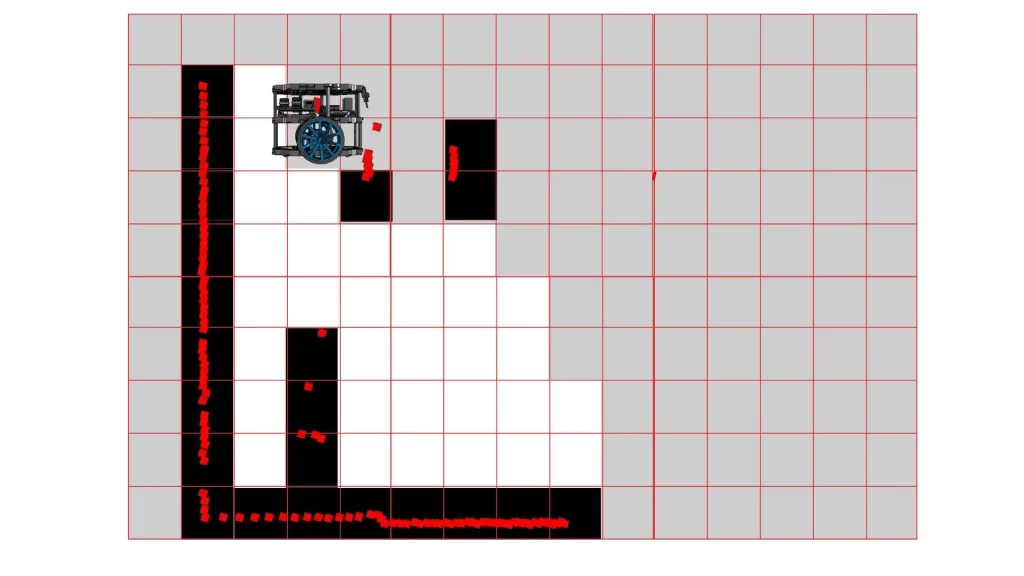
Autonomous mobile robots must both build a map of their unknown environment and localize themselves within it. Tackling mapping and localization as separate tasks often leads to drift and inconsistencies. The hard reality is: if you treat mapping and localization independently, your robot’s map will be unreliable, and localization will degrade over time. Simultaneous Localization […]
Robotics and ROS 2 – Learn by Doing!
Manipuladores

Create a ROS2 Manipulator Robot with Python and C++. Master Robot Control and MoveIt and use Alexa to move your robot. Enroll Now Get Started with Manipulator Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building […]
Autoconducción y ROS - ¡Aprenda con la práctica!
Odometría y control

Create a Self-Driving robot and learn about Robot Localization and Sensor Fusion using Kalman Filters. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds of robots, from […]
Robótica y ROS - ¡Aprenda haciendo!
Manipuladores

Create a ROS Manipulator Robot with Python and C++. Master Robot Control and MoveIt and use Alexa to move your robot. Enroll Now Get Started with Manipulator Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building […]
Autoconducción y ROS 2 - ¡Aprenda con la práctica!
Odometría y control

Create a ROS2 Self-Driving robot with Python and C++. Master Odometry, Control and Sensor Fusion using Kalman Filters. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds […]
Autoconducción y ROS 2 - ¡Aprenda con la práctica!
Plano y navegación

Create a ROS2 Self-Driving robot with Python and C++. Master Navigation, Planning and Decision Making with Behavior Tree. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds […]