
YUMI Smart Pi One: a compact SBC that surprises with completeness and usability

The world of Single Board Computers is crowded, but only a few boards truly stand out. Some aim for raw power, others for aggressive pricing. The YUMI Smart Pi One takes a third route: it doesn’t try to be a performance monster, but rather a compact device, rich in ports, easy to configure, and backed […]
Launching the Complete Robot Simulation in ROS 2

Up to this point, we have built and tested individual parts of our robot: the URDF description, Gazebo simulation, controllers, and even integration with MoveIt and a remote Alexa interface. Now it’s time to bring everything together into a single launch file that runs the complete robot simulation with all components working in harmony. This […]
How to Build a Voice Interaction Model in ROS 2
Voice control has become one of the most natural and intuitive ways to interact with robots. From simple voice commands to complex conversational systems, enabling a robot to understand and respond to spoken language opens the door to more human-like and user-friendly experiences. In this tutorial, we will build a Voice Interaction Model in ROS […]
Building Smarter Robots with Behavior Trees in ROS 2
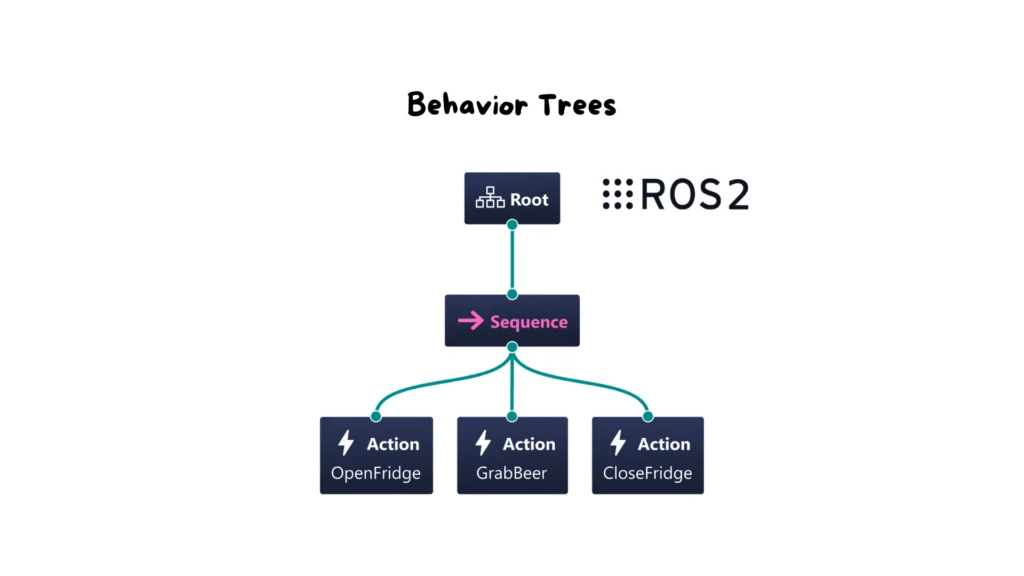
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]