
 What’s a ROS 2 Action?
What’s a ROS 2 Action?In ROS 2, nodes communicate using three main patterns: Topics, Services, and Actions.
| Communication Type | Best For | Pattern |
|---|---|---|
| Topic | Continuous data streams (e.g., sensor readings, camera feeds) | Publish / Subscribe |
| Service | Instant request–response (e.g., converting coordinates) | Request / Reply |
| Action | Long-running tasks (e.g., navigation, manipulation) | Goal → Feedback → Result (with Cancel option) |
 Why Not Just Use Services?
Why Not Just Use Services?Services are perfect for quick tasks. You send a request, wait for the reply, and you’re done. But if the task takes 5, 10, or 30 seconds, the client is left waiting with no idea what’s happening — and no way to stop it mid-execution.
Actions solve this problem by introducing:
Feedback messages — progress updates sent while the task is running.
Cancel messages — the ability to stop a task before it completes.
 The Goal → Feedback → Result Workflow
The Goal → Feedback → Result WorkflowHere’s how Actions work in ROS 2:
Goal — The client sends the task parameters.
Example: “Move to coordinates (x: 1.2, y: 0.5)” or “Calculate Fibonacci sequence up to order 10.”
Feedback — While the server works, it sends updates to the client.
Example: “I’ve reached 50% of the path” or “Current Fibonacci sequence: 0, 1, 1, 2, 3…”
Result — When the task finishes, the server sends the final outcome.
Example: “Arrived at destination” or “Final Fibonacci sequence: 0, 1, 1, 2, 3, 5, 8…”
Cancel (optional) — At any time, the client can stop the task.
Example: “Stop moving, the target object disappeared.”
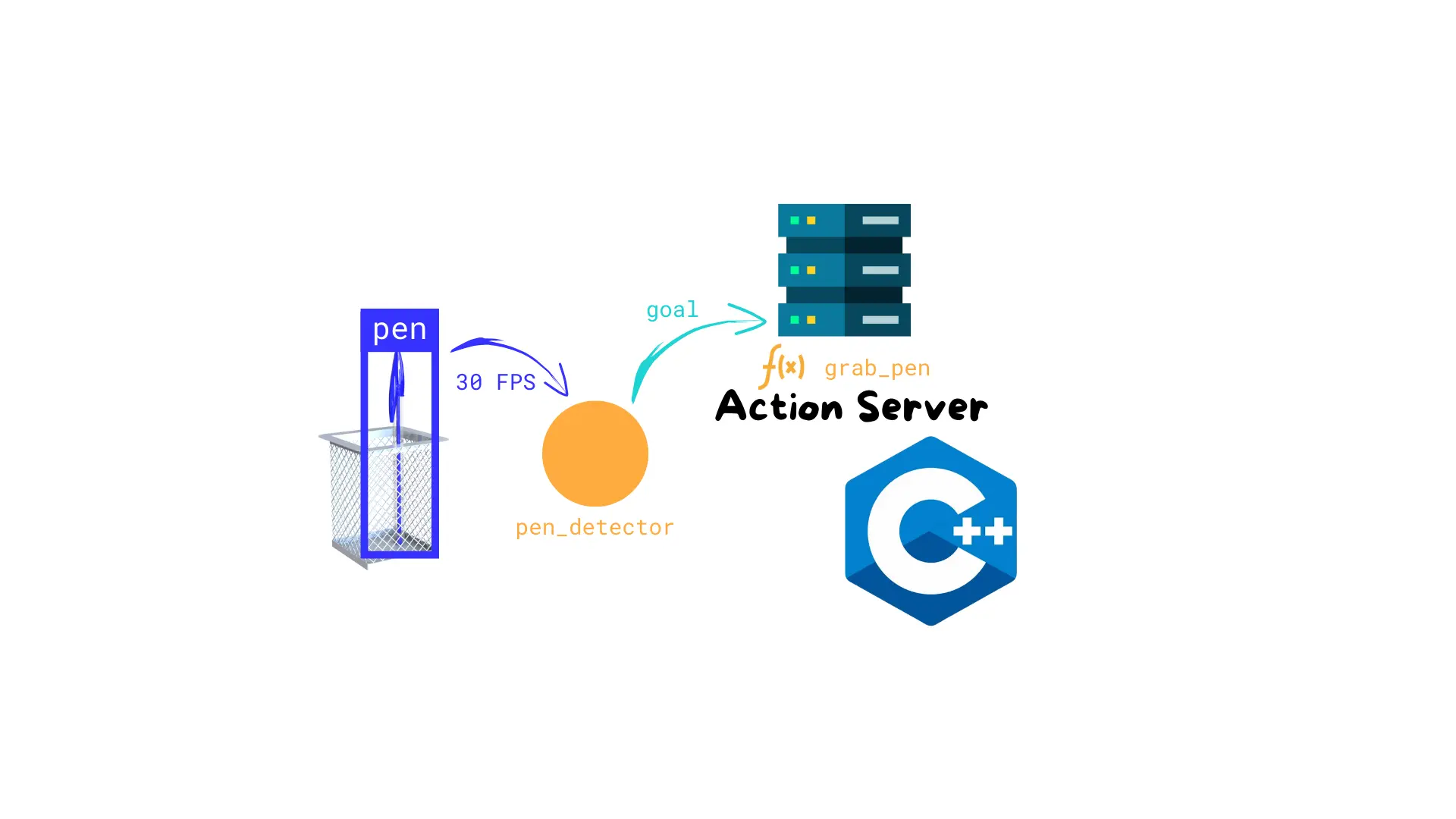
 A Practical Robotics Example
A Practical Robotics ExampleImagine you have:
A vision node that detects the position of a pen.
A manipulation node that can move the robot’s arm to grab objects.
You could design the manipulation node as an Action Server:
When the pen is detected, the vision node sends a goal to the manipulation node: “Grab the pen at position (x, y, z).”
The manipulation node starts moving the arm and sends feedback like “Arm halfway to position” or “Gripper opening.”
If the pen falls off the table, the vision node can send a cancel request, and the server stops the movement.
Regardless of whether it completes or is canceled, the server sends a result back.
This flexibility is what makes Actions essential for robotics.
 Our Project: Fibonacci Action Server in Python
Our Project: Fibonacci Action Server in PythonFor our first practical Action example, we’ll implement a C++ Action Server that calculates the Fibonacci sequence up to a user-defined order.
The Fibonacci sequence is a series where each number is the sum of the two preceding ones, starting from 0 and 1.
It’s simple to understand.
It allows us to focus on the Action Server logic instead of robot hardware.
It gives us a natural way to send progress updates (feedback) after each number is calculated.
Test the Action Server Terminal 1: Start the Server Terminal 2: Check available actions: Terminal 3: Send a goal and view feedback:
Terminal 1: Start the Server Terminal 2: Check available actions: Terminal 3: Send a goal and view feedback: