
How to Build and Test a ROS 2 Service Client in C++
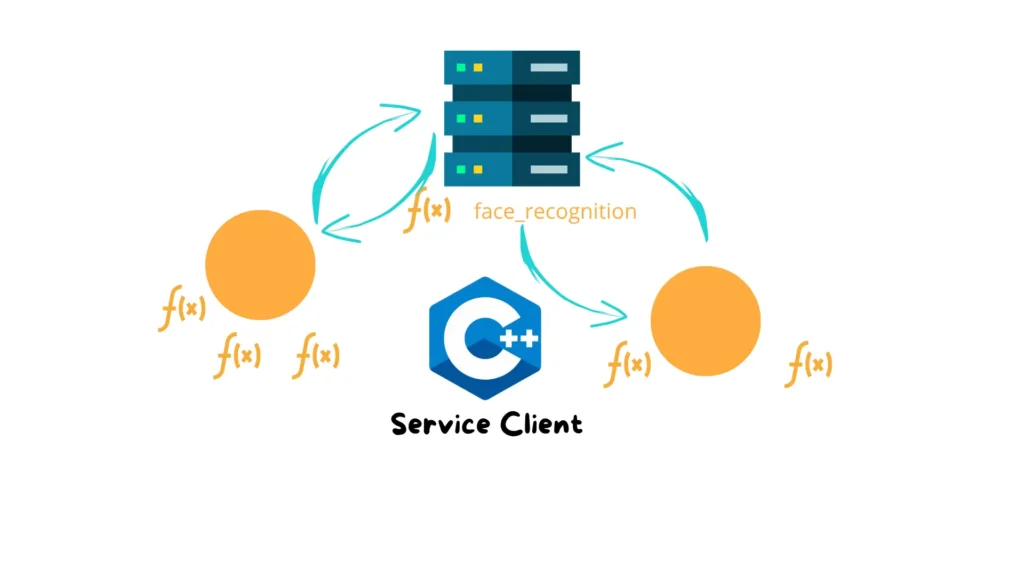
In the previous tutorial, we learned how to build a ROS 2 Service Server that takes two integers and returns their sum.Now it’s time to create the client node that sends requests to that service — this time, using C++. This tutorial will guide you through: Understanding how a ROS 2 service client works. Implementing […]
How to Build and Test a ROS 2 Service Client in Python
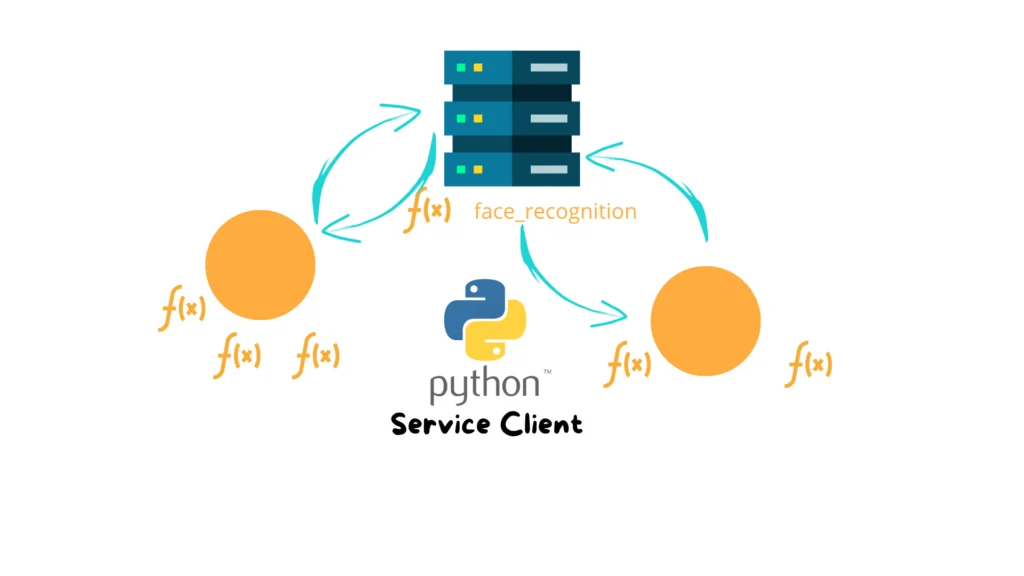
In the previous tutorial, we built a simple ROS 2 service server that takes two integers and returns their sum. Now it’s time to create a Python client node that uses this service and communicates with the server to request the calculation. 🤔 What’s a ROS 2 Service Client? A service client is a node […]
How to Build and Test a ROS 2 Service Server in C++
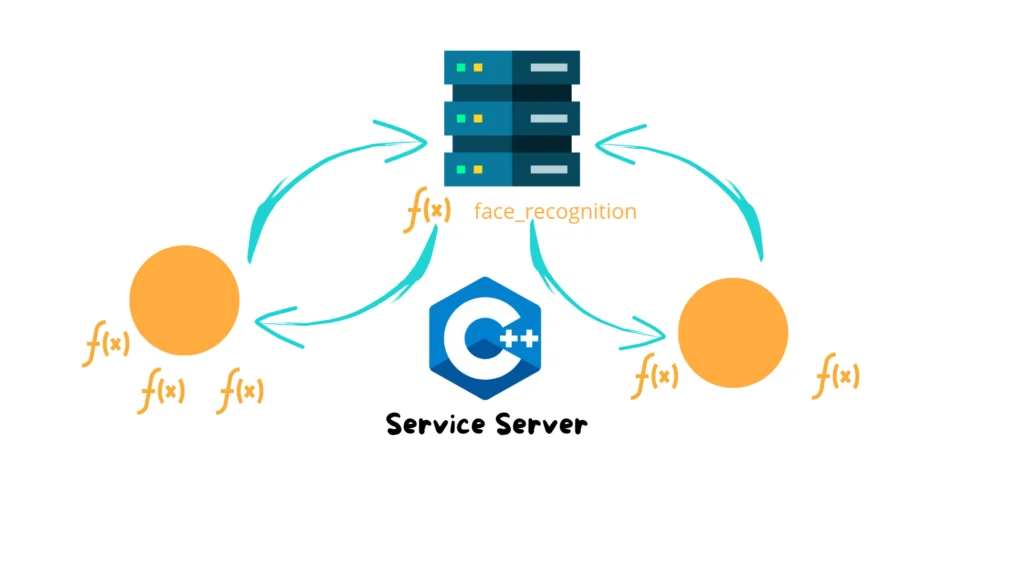
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
How to Build and Test a ROS 2 Service Server in Python
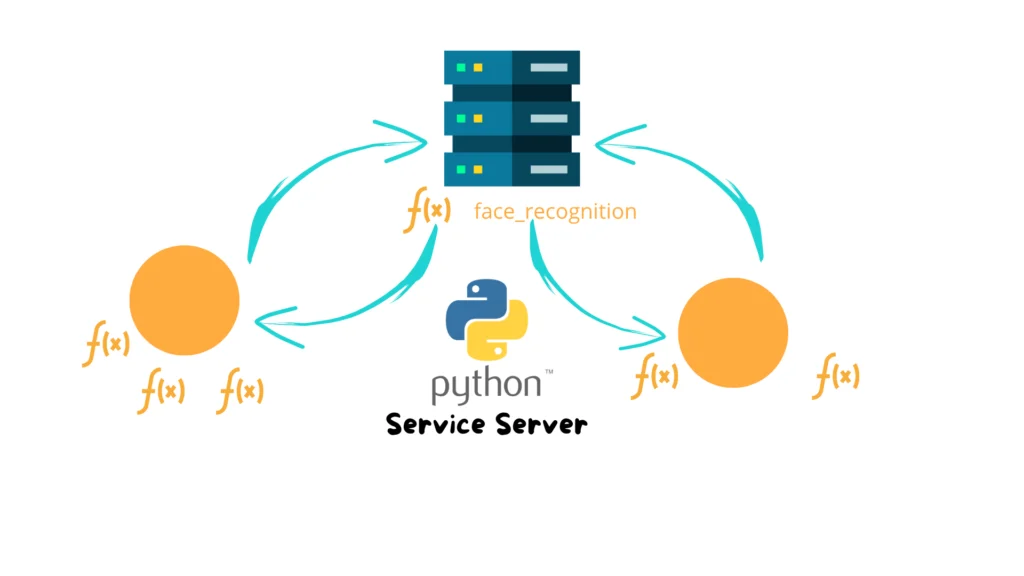
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
Smarter Path Planning in ROS 2: Implementing A* in Python
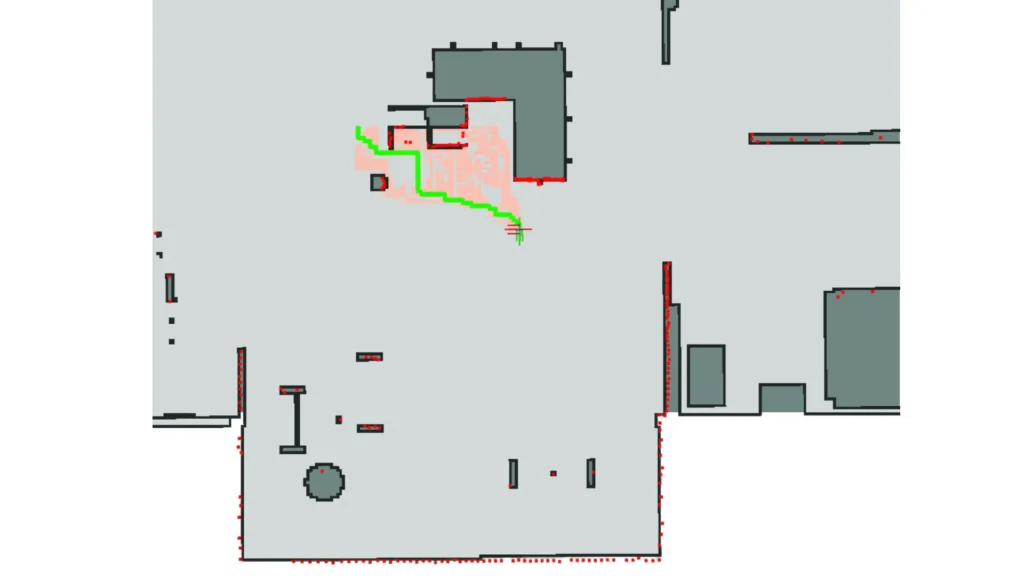
In the world of robotics, planning a path from one point to another isn’t just about finding a route—it’s about doing it intelligently. If you’ve ever implemented Dijkstra’s algorithm, you know how powerful it is… but also how slow it can be when the map gets big. What if we could be smarter? What if […]
How to Integrate ROS Control into a Simulated Robot in Gazebo

Controlling a simulated robot as if it were real — that’s the power of ROS Control. In this guide, we’ll see how to properly configure the URDF model so ROS can “command” the simulated motors of our BumperBot. 🚀 Introduction: What Is ROS Control and Why Use It? Imagine building a robot with real motors, […]
Choosing the Right Locomotion System for Mobile Robots
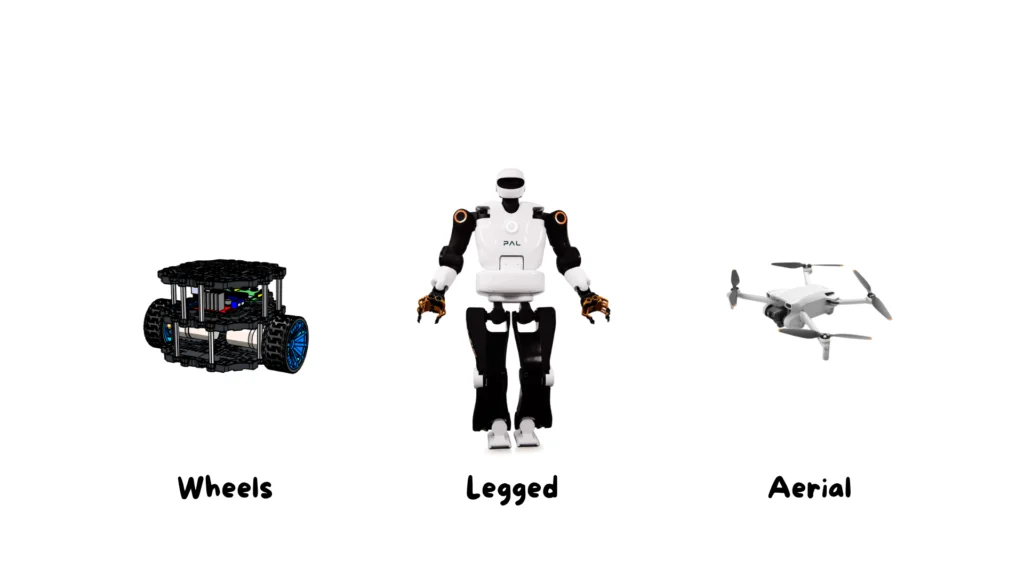
Whether it’s a four-legged robot climbing rocky hills or a drone hovering over a building site, locomotion is what gives mobile robots the power to explore, navigate, and interact with the world. But what makes one locomotion system better than another? Is there a perfect design? The answer is more nuanced than you might think. […]
How to create a simple Subscriber Node with C++ – ROS2
In this tutorial, we’ll create a simple ROS 2 node in C++ that subscribes to a topic and listens for messages published on it. If you haven’t checked out the simple publisher tutorial, I recommend starting there first. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), software is organized […]
How to create a simple Publisher Node with Python – ROS2

In this guide, we’ll build a simple publisher node using Python in ROS2.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]
How to create a simple Publisher Node with C++ – ROS2

In this tutorial, we’ll learn how to create a simple ROS2 node using C++ that sends text messages to a topic.This is one of the fundamental skills in the ROS2 ecosystem — allowing different programs (called nodes) to talk to each other via topics. 🔍 What is a ROS Node and a Topic? In ROS […]