
Building Smarter Robots with Behavior Trees in ROS 2
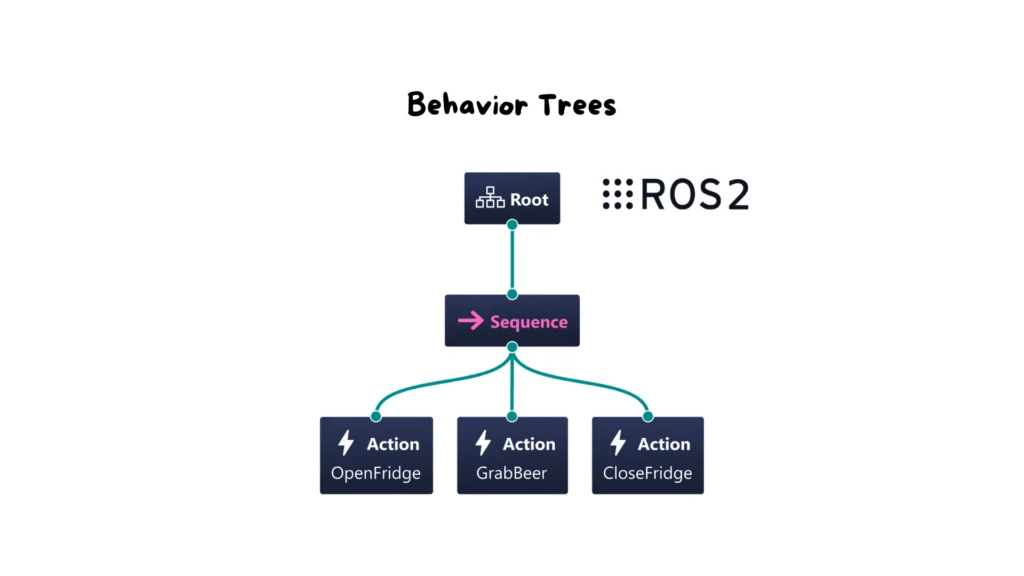
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]
Self Driving and ROS 2 – Learn by Doing!
Plan & Navigation

Create a ROS2 Self-Driving robot with Python and C++. Master Navigation, Planning and Decision Making with Behavior Tree. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds […]