
Launching the Complete Robot Simulation in ROS 2

Up to this point, we have built and tested individual parts of our robot: the URDF description, Gazebo simulation, controllers, and even integration with MoveIt and a remote Alexa interface. Now it’s time to bring everything together into a single launch file that runs the complete robot simulation with all components working in harmony. This […]
How to Build a Voice Interaction Model in ROS 2
Voice control has become one of the most natural and intuitive ways to interact with robots. From simple voice commands to complex conversational systems, enabling a robot to understand and respond to spoken language opens the door to more human-like and user-friendly experiences. In this tutorial, we will build a Voice Interaction Model in ROS […]
Building Smarter Robots with Behavior Trees in ROS 2
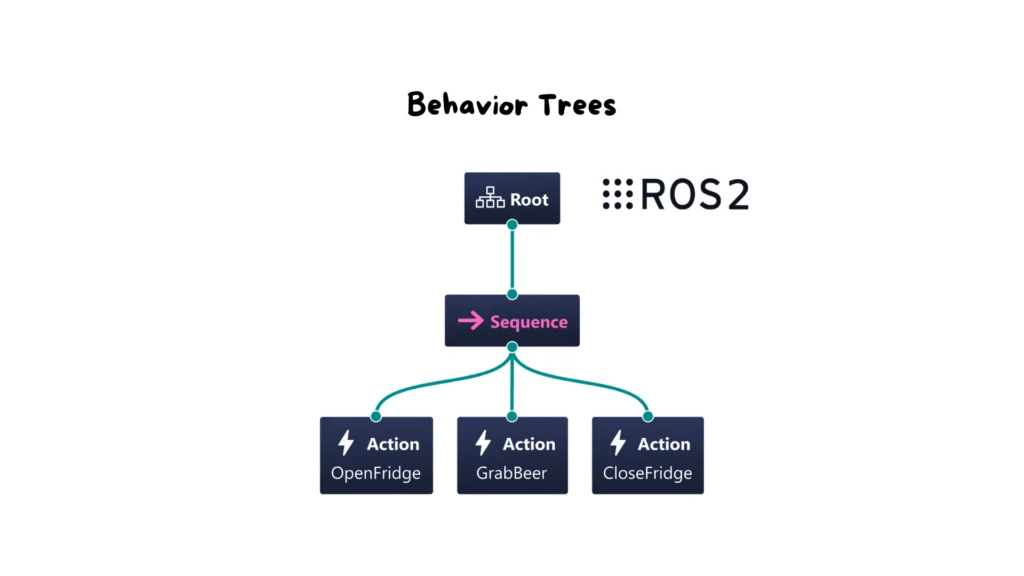
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]
ROS vs ROS 2: What’s the Difference, Which One to Use
If you’re working in robotics — or thinking about it — chances are you’ve come across ROS and ROS 2. These are two of the most widely used open-source frameworks for building, controlling, and connecting complex robots.But what’s the real difference between the two? And which one should you choose today? 📖 How ROS and […]
How to create a ROS2 Workspace

If you’re getting started with ROS 2 on Ubuntu 24.04 LTS, one of the very first things you’ll need to do is create a workspace. A workspace is simply a folder where you keep all your ROS 2 packages, build them, and manage your development environment. In this guide, we’ll walk through — step by […]