
Computer Science & Robotics – Learn by Doing! Linux to ROS 2

Master Linux, Docker, Git, and ROS 2: the Fundamental Tools to succeed as a Robotics Software Developer! Enroll Now Master the essential tools to build, simulate, and deploy modern robots. Section 1 Linux Operating System Master the foundations of Linux — the backbone of every modern robotics system! You’ll build a solid understanding of how […]
How to Interface Your ROS 2 Robot with Alexa Using Flask and Python

👉 How to Interface Your ROS 2 Robot with Alexa Using Flask and Python In this hands-on lab, you’ll learn how to create a Python web server that acts as a bridge between an Alexa Skill and your ROS 2 robot. By using Flask and the Alexa Skills Kit SDK, you will interpret voice commands […]
How to Link Your Alexa Skill to a Local ROS 2 Server Using ngrok
👉 How to Link Your Alexa Skill to a Local ROS 2 Server Using ngrok In this tutorial, you’ll learn how to connect the Alexa Skill you previously created to a local ROS 2 server using ngrok. This setup will allow your voice commands to travel from Amazon’s cloud to your machine, where they can […]
Control Your ROS 2 Robot with Alexa

In this guide, you’ll learn how to connect your ROS 2 robot to Amazon Alexa using the internet. This connection enables you to control your robot with voice commands using custom Alexa Skills, without requiring a physical Alexa device. We’ll use the ASK SDK, ngrok, and ROS 2 action servers to complete the setup. By […]
How to Build and Test a ROS 2 Service Server in C++
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
How to control a DC Motor using Arduino and PID Algorithm
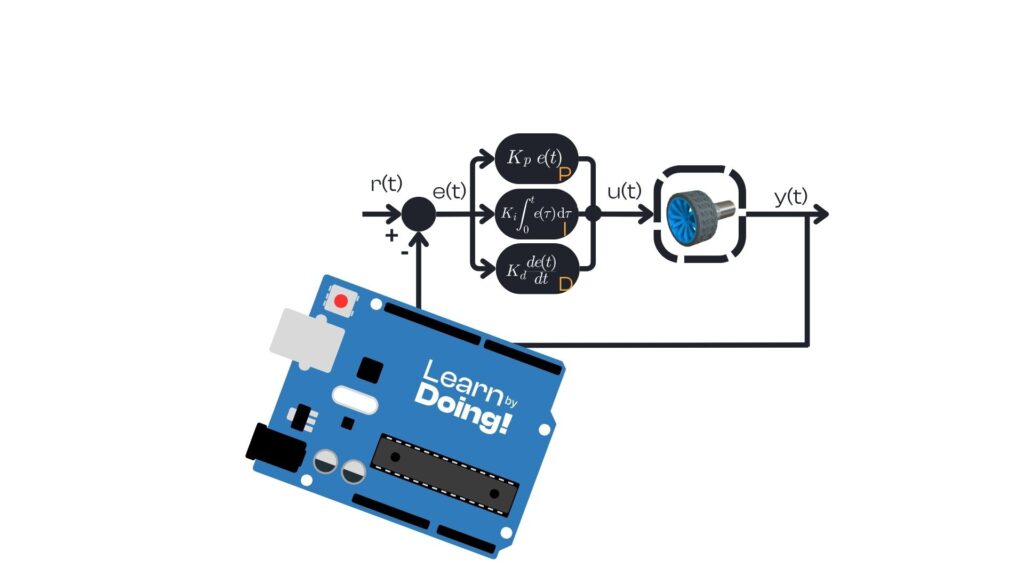
Controlling the speed and direction of a DC motor precisely is essential for many robotics and automation projects. In this tutorial, we will learn how to use a PID controller to regulate the velocity of two DC motors connected through an L298N driver, with feedback from wheel encoders. Why use a PID controller for motor […]
Choosing the Right Locomotion System for Mobile Robots
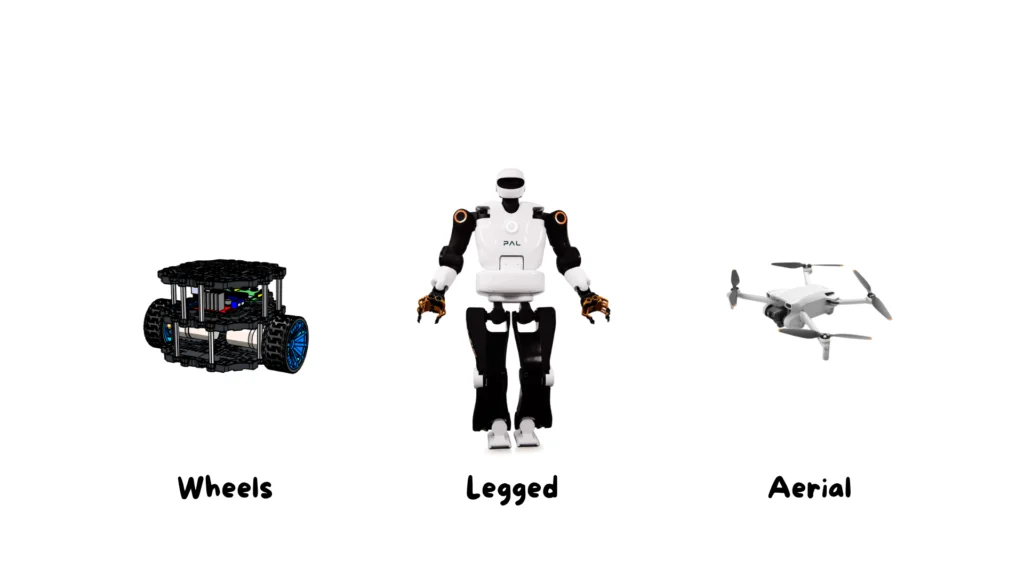
Whether it’s a four-legged robot climbing rocky hills or a drone hovering over a building site, locomotion is what gives mobile robots the power to explore, navigate, and interact with the world. But what makes one locomotion system better than another? Is there a perfect design? The answer is more nuanced than you might think. […]
Understanding PWM in Robotics
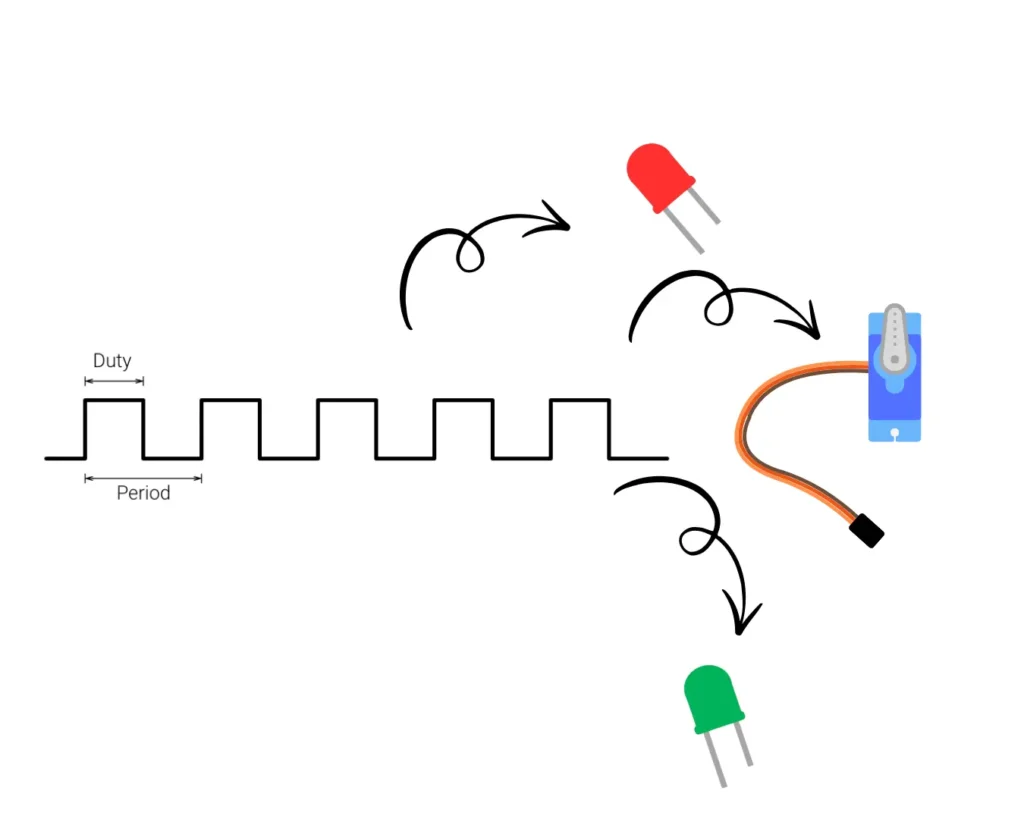
In robotics, controlling how fast a motor spins or how bright an LED shines is essential. PWM — Pulse Width Modulation — is the tool that makes this possible. Let’s dive into what PWM is, how it works, and how you can use it in your own robotic projects. 🔍 What is a PWM? PWM […]
How to create a simple Subscriber Node with C++ – ROS2
In this tutorial, we’ll create a simple ROS 2 node in C++ that subscribes to a topic and listens for messages published on it. If you haven’t checked out the simple publisher tutorial, I recommend starting there first. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), software is organized […]
How to use i2c lcd with Arduino
In this tutorial, you’ll learn how to use a 16×2 LCD display with an I2C interface using the Adafruit_LiquidCrystal library. The code example shows how to display a counter that increments every second and blinks the backlight to create a visual effect. What is an I2C LCD Display? When working with LCD screens and microcontrollers […]