
Computer Science & Robotics – Learn by Doing! Linux to ROS 2

Master Linux, Docker, Git, and ROS 2: the Fundamental Tools to succeed as a Robotics Software Developer! Enroll Now Master the essential tools to build, simulate, and deploy modern robots. Section 1 Linux Operating System Master the foundations of Linux — the backbone of every modern robotics system! You’ll build a solid understanding of how […]
Launching the Complete Robot Simulation in ROS 2

Up to this point, we have built and tested individual parts of our robot: the URDF description, Gazebo simulation, controllers, and even integration with MoveIt and a remote Alexa interface. Now it’s time to bring everything together into a single launch file that runs the complete robot simulation with all components working in harmony. This […]
How to Build a Voice Interaction Model in ROS 2
Voice control has become one of the most natural and intuitive ways to interact with robots. From simple voice commands to complex conversational systems, enabling a robot to understand and respond to spoken language opens the door to more human-like and user-friendly experiences. In this tutorial, we will build a Voice Interaction Model in ROS […]
How to Develop a Custom Alexa Skill to Control Your ROS 2 Robot

👉 How to Develop a Custom Alexa Skill to Control Your ROS 2 Robot In this step-by-step lab, you’ll learn how to create a custom Alexa Skill from scratch that can send commands to your ROS 2 robot. We’ll use the Alexa Developer Console to define intents and invocation phrases, and configure the skill to […]
How to control a DC Motor using Arduino and PID Algorithm
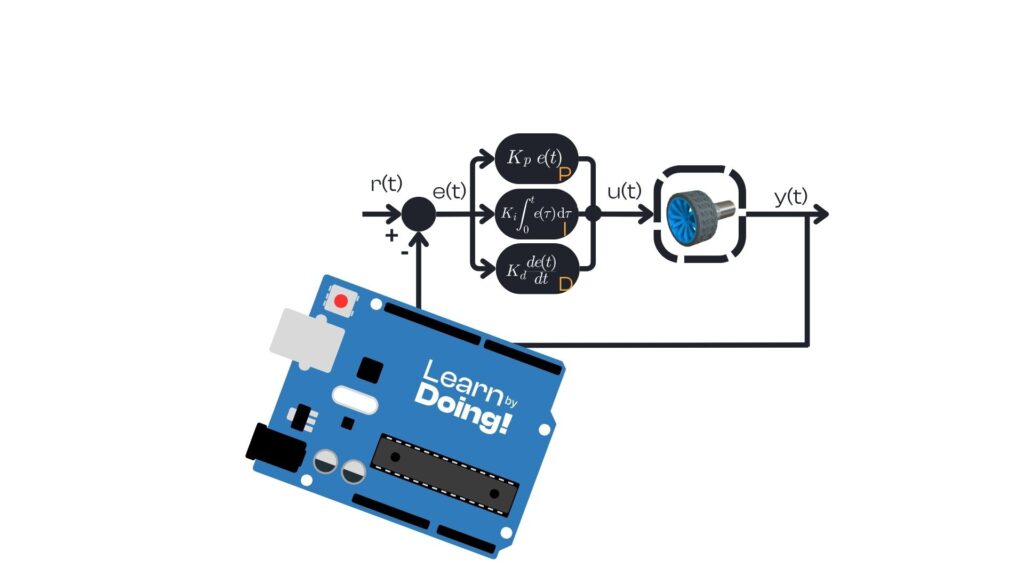
Controlling the speed and direction of a DC motor precisely is essential for many robotics and automation projects. In this tutorial, we will learn how to use a PID controller to regulate the velocity of two DC motors connected through an L298N driver, with feedback from wheel encoders. Why use a PID controller for motor […]
PID Control Algorithm
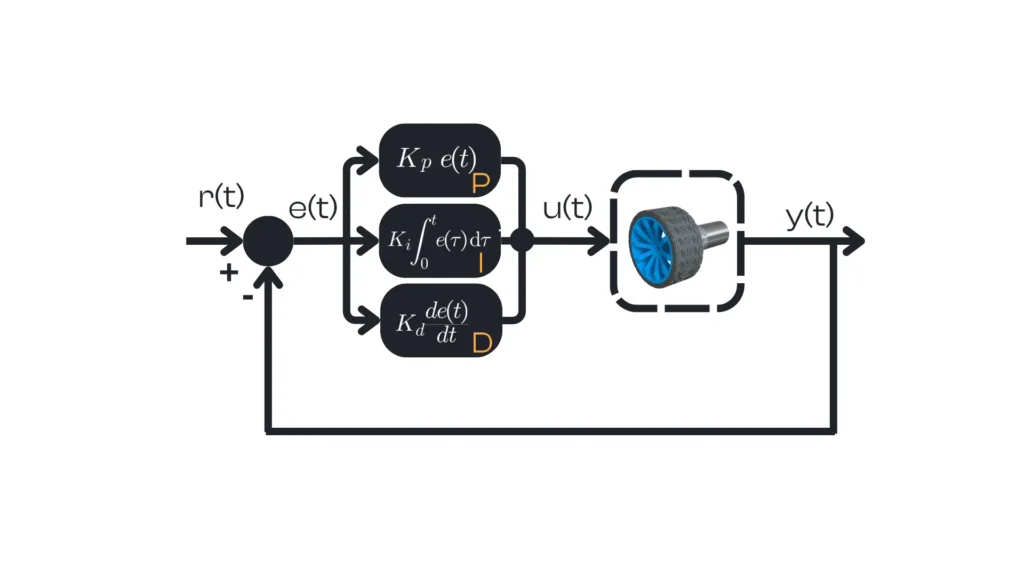
In control theory, the PID (Proportional–Integral–Derivative) algorithm is often considered the holy grail of control. PID is one of the most successful control algorithms due to its flexibility and simplicity, and it’s relatively easy to implement. In fact, the PID control algorithm has proven robust and flexible enough to yield excellent results in a wide variety […]
How to use humidity sensor with Arduino
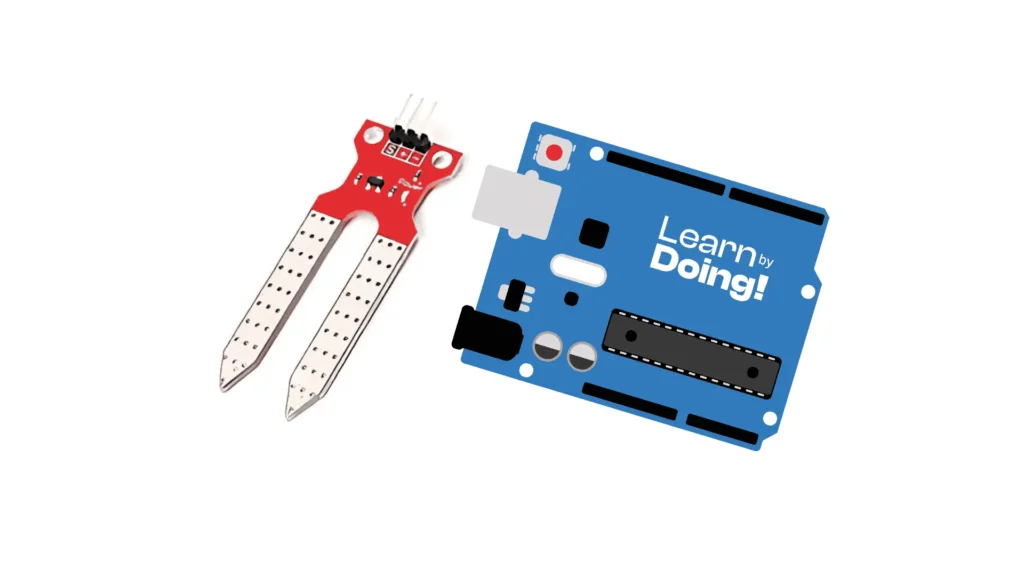
In this tutorial, you will learn how to use a basic analog soil moisture sensor with an Arduino Uno to measure soil humidity. Instead of using a digital humidity sensor, we will power the analog sensor selectively to reduce corrosion, read the moisture level, and visually represent it using 5 LEDs ranging from dry to […]
How to use 16×2 lcd display with arduino

In this tutorial, we will explore advanced functionalities of a standard 16×2 character LCD with an Arduino Uno, including custom characters, contrast control, and backlight management. 📝 Required components Arduino Uno 16×2 Character LCD (HD44780-based) Potentiometer (10kΩ) for contrast 220Ω resistor (for backlight) Breadboard Jumper wires Step 1: Wiring the Electronics 1 Connect VSS to […]
How to turn on a SPDT RELAY with arduino
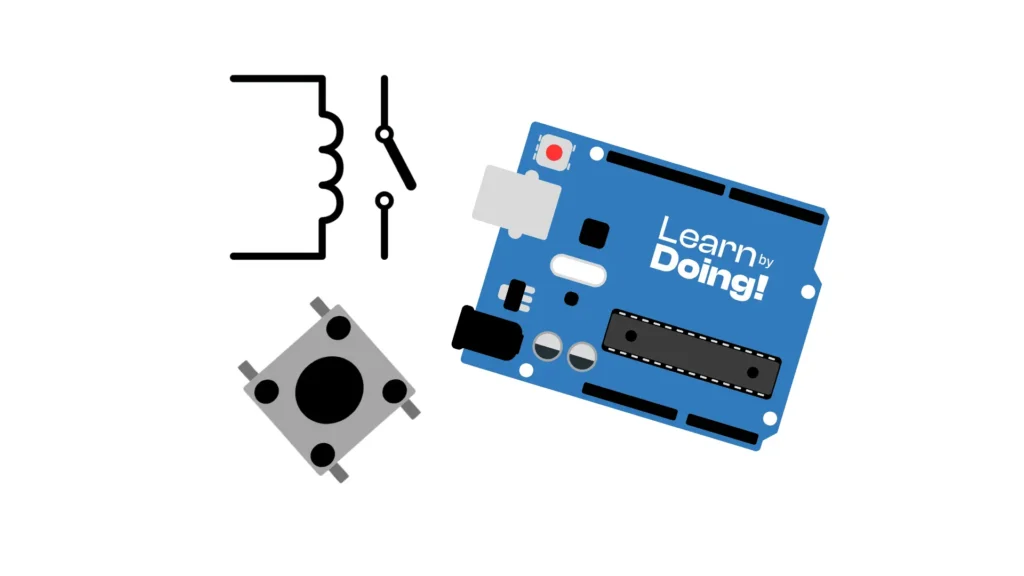
In this tutorial, we will learn how to control an SPDT relay module with an Arduino Uno using a push button as a toggle switch. Each press of the button will change the state of the relay: if the coil is off, it will turn on and stay on until the button is pressed again […]
Robotics and ROS 2 – Learn by Doing!
Manipulators

Create a ROS2 Manipulator Robot with Python and C++. Master Robot Control and MoveIt and use Alexa to move your robot. Enroll Now Get Started with Manipulator Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building […]