
Safety in Human–Robot Interaction: Speed and Separation Monitoring with ROS 2
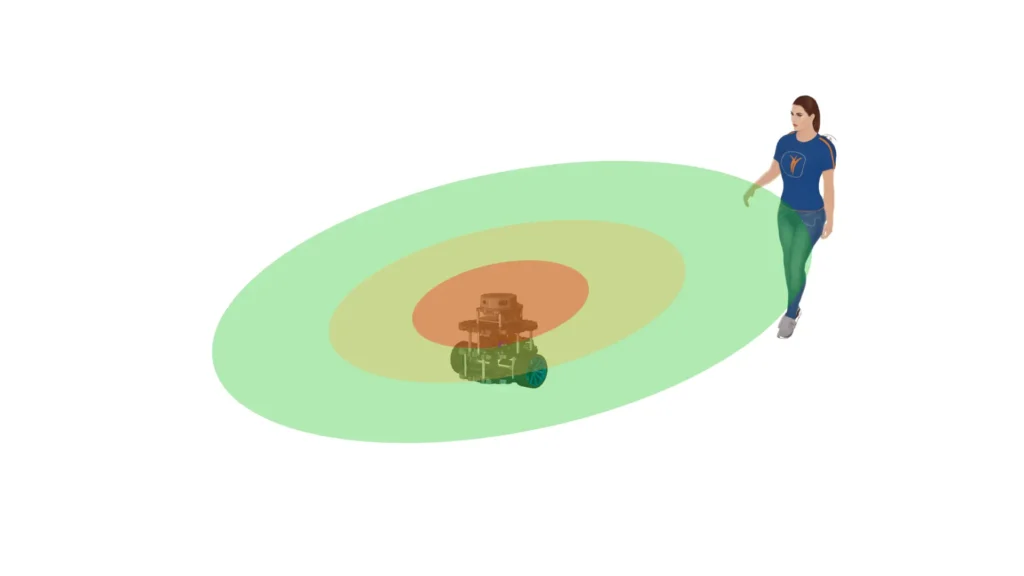
When robots and humans share the same workspace, functional safety becomes a first-class requirement. A collaborative robot must be able to adapt its motion according to the level of risk in the environment, slowing down or stopping entirely when a person comes too close.Unlike traditional setups with cages or physical barriers, this approach relies on […]
Launching the Complete Robot Simulation in ROS 2

Up to this point, we have built and tested individual parts of our robot: the URDF description, Gazebo simulation, controllers, and even integration with MoveIt and a remote Alexa interface. Now it’s time to bring everything together into a single launch file that runs the complete robot simulation with all components working in harmony. This […]
How to Build a Voice Interaction Model in ROS 2
Voice control has become one of the most natural and intuitive ways to interact with robots. From simple voice commands to complex conversational systems, enabling a robot to understand and respond to spoken language opens the door to more human-like and user-friendly experiences. In this tutorial, we will build a Voice Interaction Model in ROS […]