
How to Develop a Custom Alexa Skill to Control Your ROS 2 Robot

👉 How to Develop a Custom Alexa Skill to Control Your ROS 2 Robot In this step-by-step lab, you’ll learn how to create a custom Alexa Skill from scratch that can send commands to your ROS 2 robot. We’ll use the Alexa Developer Console to define intents and invocation phrases, and configure the skill to […]
How to Build and Test a ROS 2 Service Client in Python
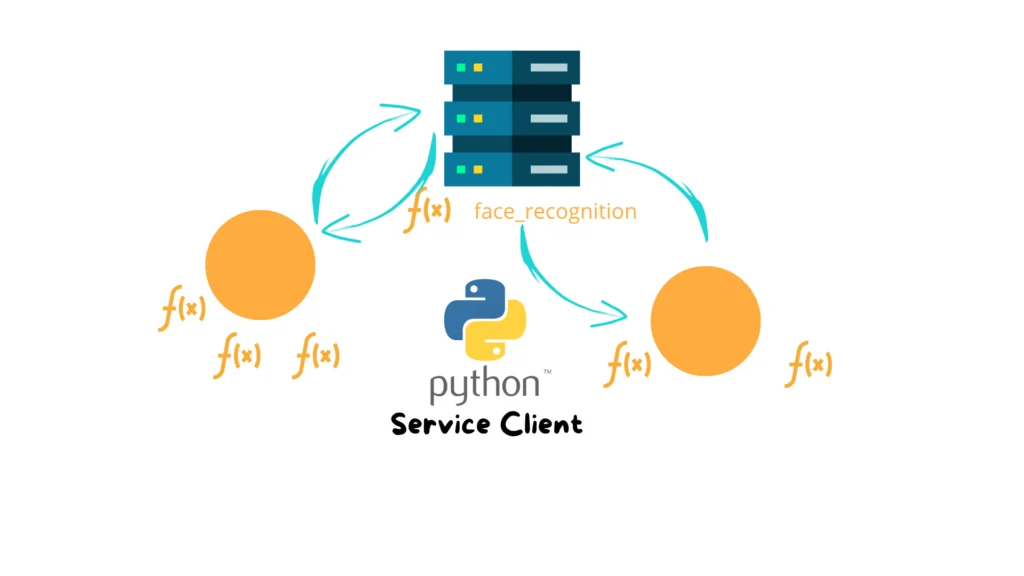
In the previous tutorial, we built a simple ROS 2 service server that takes two integers and returns their sum. Now it’s time to create a Python client node that uses this service and communicates with the server to request the calculation. 🤔 What’s a ROS 2 Service Client? A service client is a node […]
Control Your ROS 2 Robot with Alexa

In this guide, you’ll learn how to connect your ROS 2 robot to Amazon Alexa using the internet. This connection enables you to control your robot with voice commands using custom Alexa Skills, without requiring a physical Alexa device. We’ll use the ASK SDK, ngrok, and ROS 2 action servers to complete the setup. By […]
How to Build and Test a ROS 2 Service Server in C++
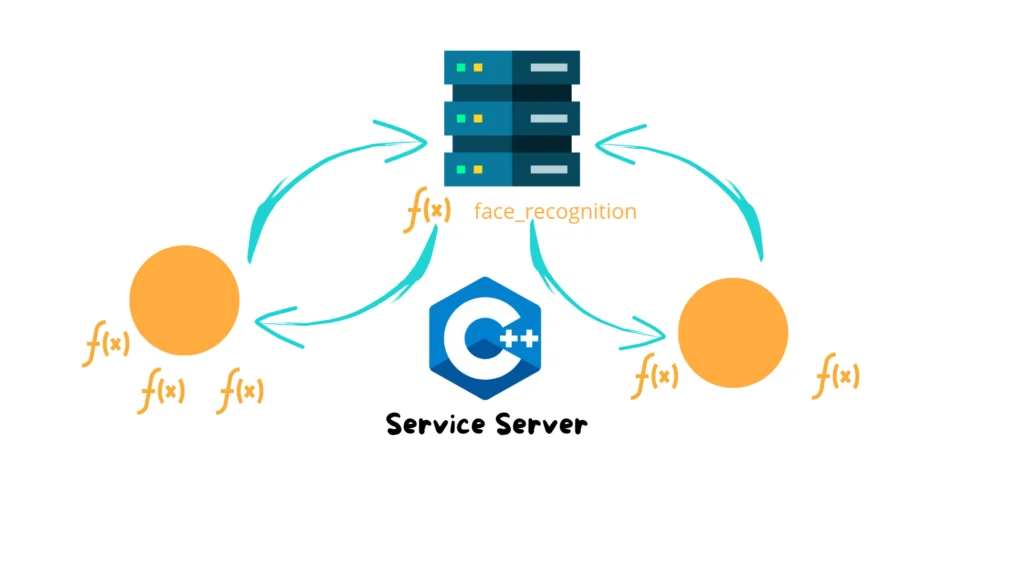
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
How to Build and Test a ROS 2 Service Server in Python
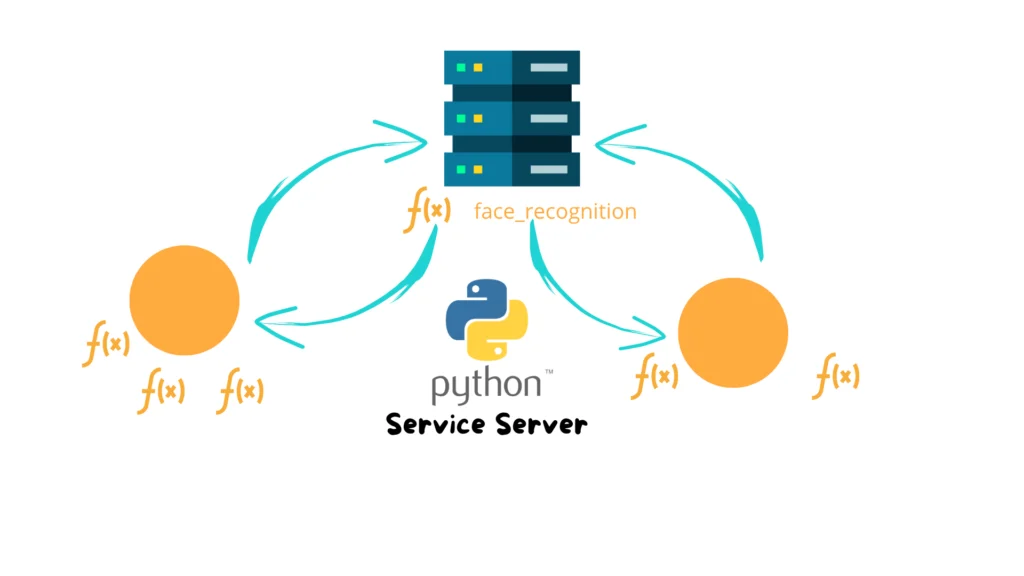
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
Smarter Path Planning in ROS 2: Implementing A* in Python
In the world of robotics, planning a path from one point to another isn’t just about finding a route—it’s about doing it intelligently. If you’ve ever implemented Dijkstra’s algorithm, you know how powerful it is… but also how slow it can be when the map gets big. What if we could be smarter? What if […]
How to control a DC Motor using Arduino and PID Algorithm
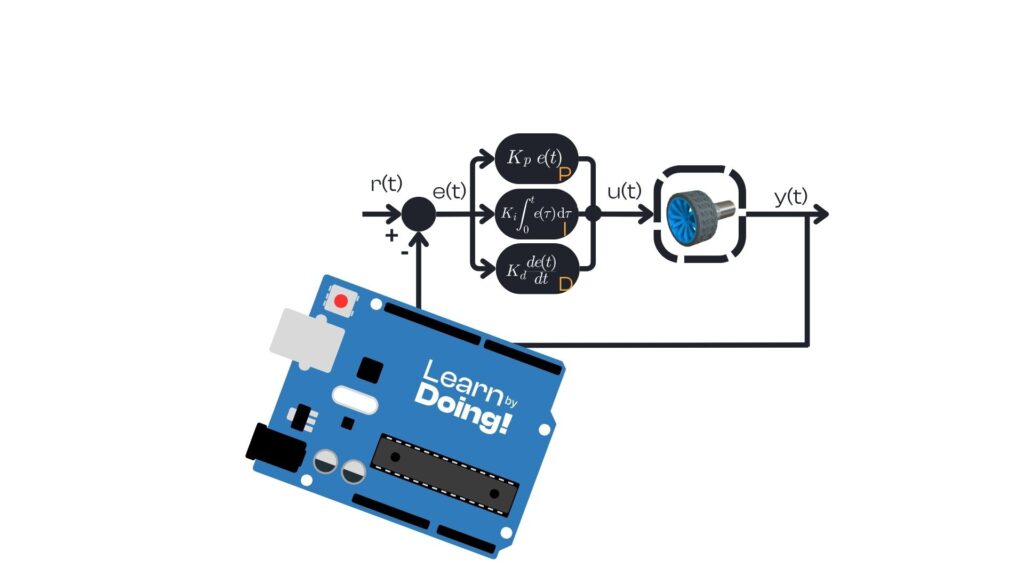
Controlling the speed and direction of a DC motor precisely is essential for many robotics and automation projects. In this tutorial, we will learn how to use a PID controller to regulate the velocity of two DC motors connected through an L298N driver, with feedback from wheel encoders. Why use a PID controller for motor […]
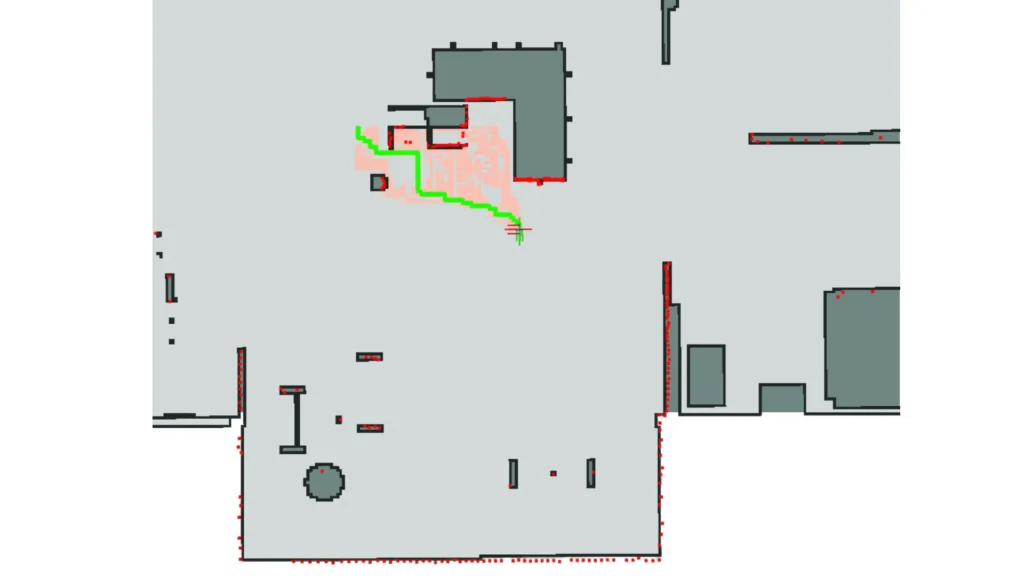
Advanced SLAM in ROS2: Mapping with Cartographer
In this tutorial, you’ll learn how to use Google’s Cartographer with ROS2 to perform advanced 2D SLAM (Simultaneous Localization and Mapping). Cartographer is a real-time SLAM algorithm that provides loop closure and accurate map construction in dynamic environments. We’ll use a simulated TurtleBot3, but the steps are adaptable to real robots. 📝 Requirements – ROS2 […]
Autonomous Navigation in ROS2 with Nav2 and Behavior Tree
In this tutorial, you will learn how to perform autonomous navigation in ROS2 using the Nav2 stack with integrated Behavior Trees (BT). The Nav2 framework provides a powerful modular system that allows robots to navigate in a known map using planning, localization, and behavior control components. 📝 Requirements – ROS2 installed (e.g., Humble or Foxy) – […]
How to Integrate ROS Control into a Simulated Robot in Gazebo

Controlling a simulated robot as if it were real — that’s the power of ROS Control. In this guide, we’ll see how to properly configure the URDF model so ROS can “command” the simulated motors of our BumperBot. 🚀 Introduction: What Is ROS Control and Why Use It? Imagine building a robot with real motors, […]