
Computer Science & Robotics – Learn by Doing! Linux to ROS 2

Master Linux, Docker, Git, and ROS 2: the Fundamental Tools to succeed as a Robotics Software Developer! Enroll Now Master the essential tools to build, simulate, and deploy modern robots. Section 1 Linux Operating System Master the foundations of Linux — the backbone of every modern robotics system! You’ll build a solid understanding of how […]
How to Build and Test a ROS 2 Action Server in Python
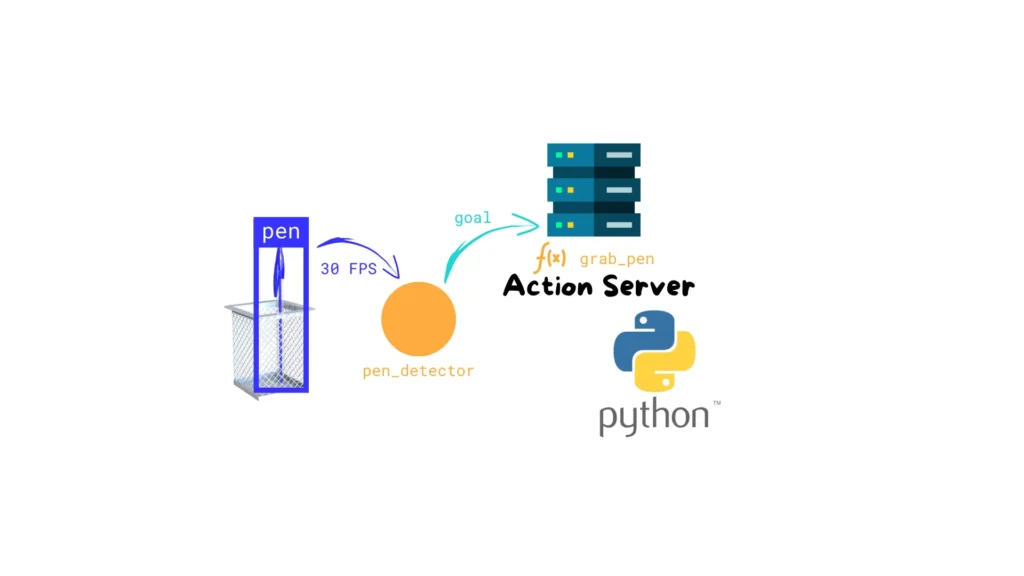
When working with robots, not every task is instantaneous. Some operations take time: navigating across a room, picking up an object, scanning an area, or performing a long computation.In ROS 2, these “long-running” tasks need a special way for nodes to talk to each other — one that allows progress updates and the ability to […]
How to Build and Test a ROS 2 Service Client in C++
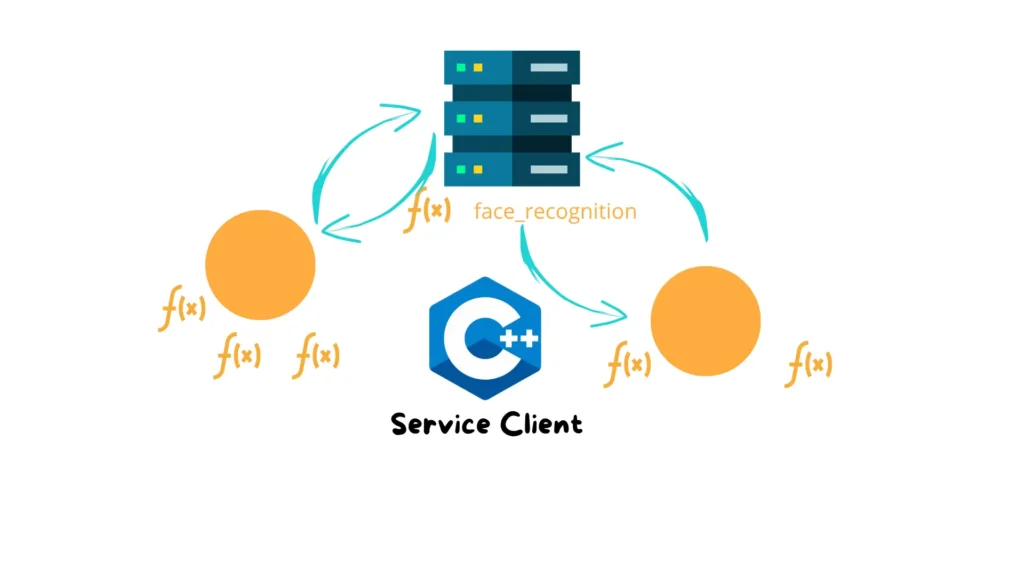
In the previous tutorial, we learned how to build a ROS 2 Service Server that takes two integers and returns their sum.Now it’s time to create the client node that sends requests to that service — this time, using C++. This tutorial will guide you through: Understanding how a ROS 2 service client works. Implementing […]
Building Smarter Robots with Behavior Trees in ROS 2
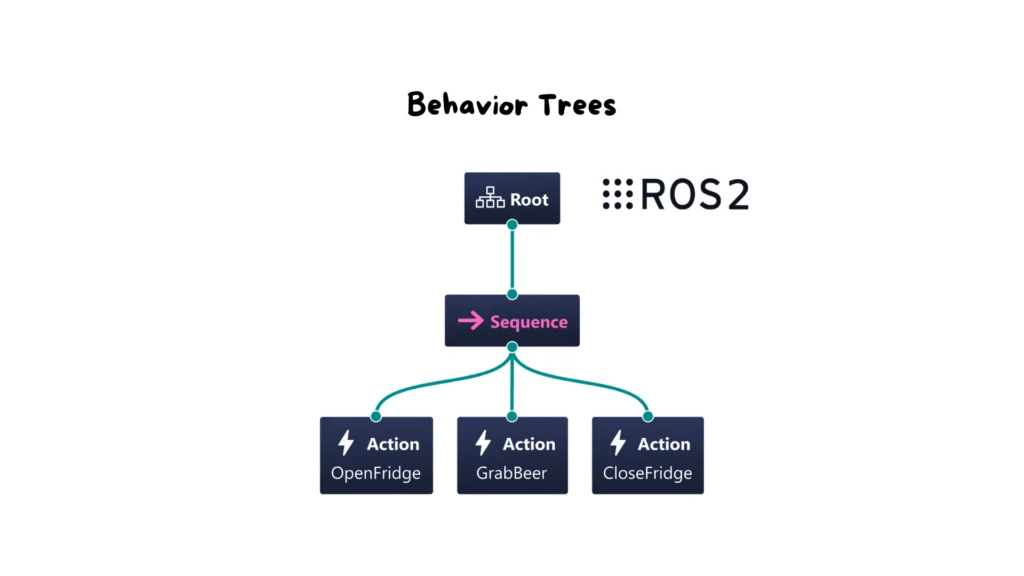
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]
How to Build and Test a ROS 2 Service Client in Python
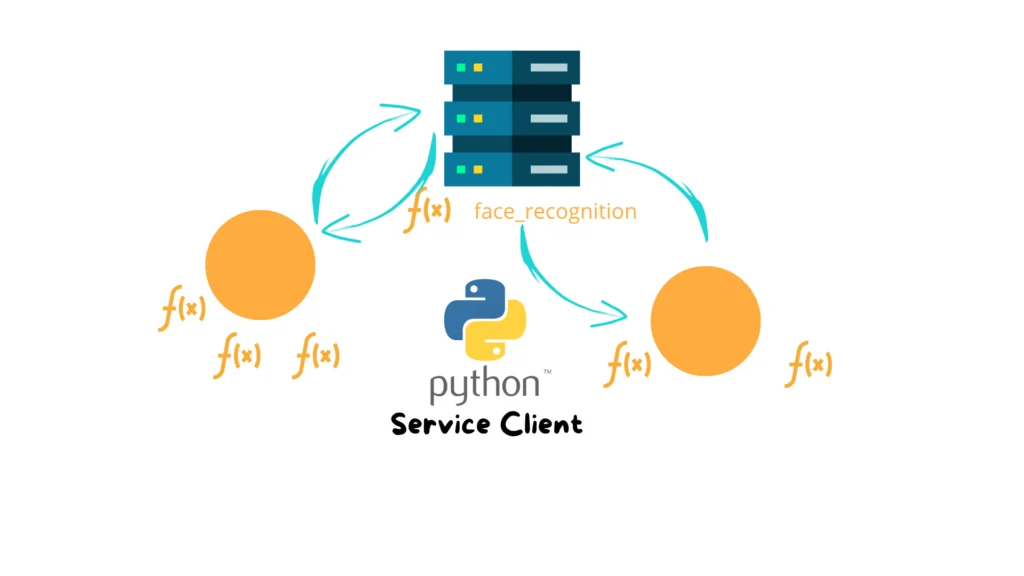
In the previous tutorial, we built a simple ROS 2 service server that takes two integers and returns their sum. Now it’s time to create a Python client node that uses this service and communicates with the server to request the calculation. 🤔 What’s a ROS 2 Service Client? A service client is a node […]
How to Build and Test a ROS 2 Service Server in Python
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
PID Control Algorithm
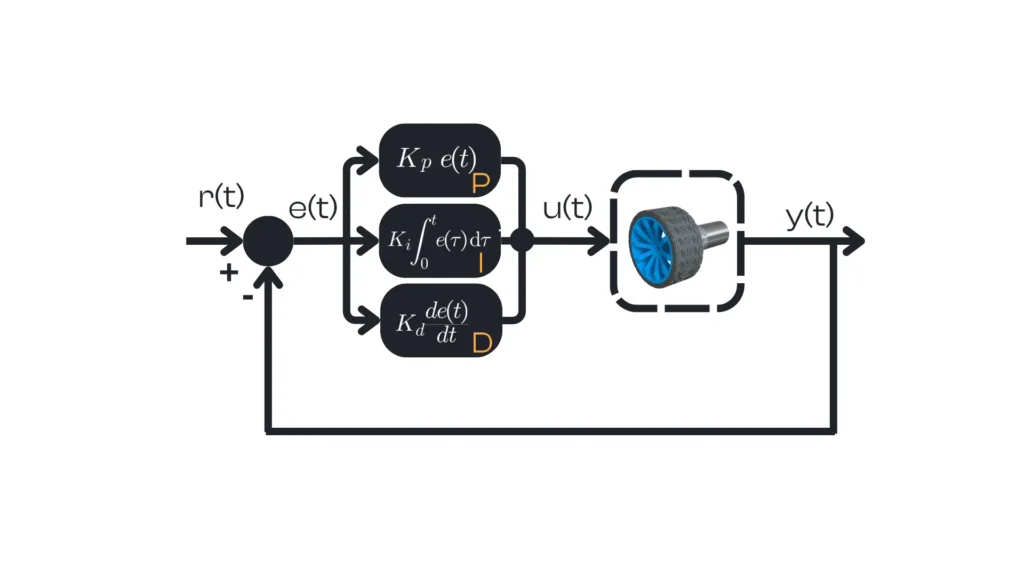
In control theory, the PID (Proportional–Integral–Derivative) algorithm is often considered the holy grail of control. PID is one of the most successful control algorithms due to its flexibility and simplicity, and it’s relatively easy to implement. In fact, the PID control algorithm has proven robust and flexible enough to yield excellent results in a wide variety […]
How to Integrate ROS Control into a Simulated Robot in Gazebo

Controlling a simulated robot as if it were real — that’s the power of ROS Control. In this guide, we’ll see how to properly configure the URDF model so ROS can “command” the simulated motors of our BumperBot. 🚀 Introduction: What Is ROS Control and Why Use It? Imagine building a robot with real motors, […]
How to create a simple Publisher Node with Python – ROS2

In this guide, we’ll build a simple publisher node using Python in ROS2.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]
How to create a simple Publisher Node with Python – ROS
In this guide, we’ll build a simple publisher node using Python in ROS.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]