
Smarter Path Planning in ROS 2: Implementing A* in Python
In the world of robotics, planning a path from one point to another isn’t just about finding a route—it’s about doing it intelligently. If you’ve ever implemented Dijkstra’s algorithm, you know how powerful it is… but also how slow it can be when the map gets big. What if we could be smarter? What if […]
PID Control Algorithm
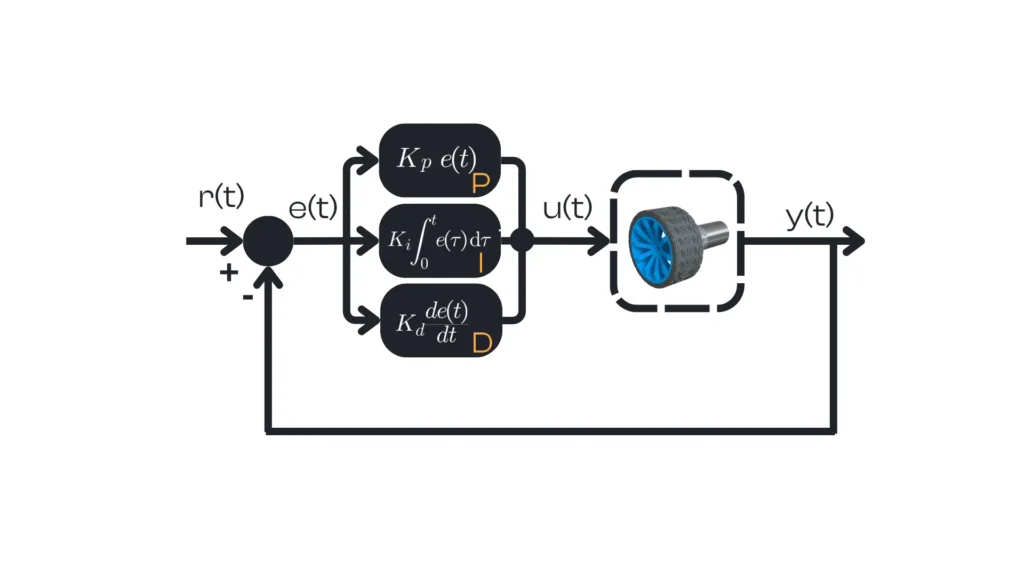
In control theory, the PID (Proportional–Integral–Derivative) algorithm is often considered the holy grail of control. PID is one of the most successful control algorithms due to its flexibility and simplicity, and it’s relatively easy to implement. In fact, the PID control algorithm has proven robust and flexible enough to yield excellent results in a wide variety […]
Navigazione waypoint ROS2 con ripianificazione dinamica tramite Nav2
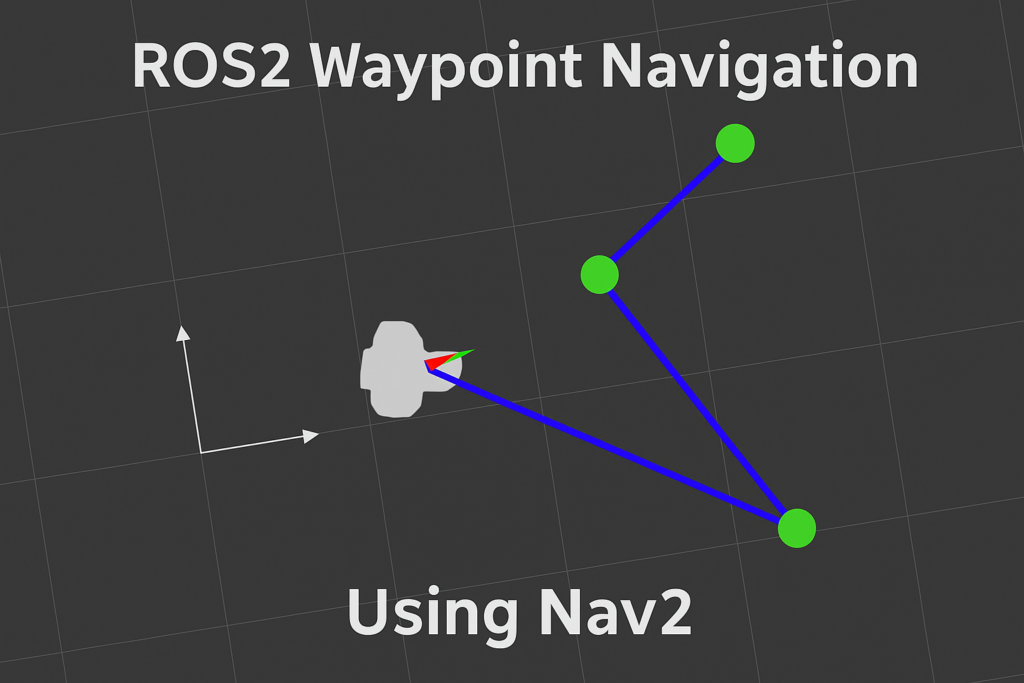
In this tutorial, you’ll learn how to implement waypoint-based navigation in ROS2 using the Nav2 stack, enhanced with dynamic replanning capabilities. This setup enables your robot to follow a sequence of predefined goals and recalculate the path if unexpected obstacles appear. It’s ideal for autonomous patrol or area coverage in indoor environments. 📝 Requirements – […]
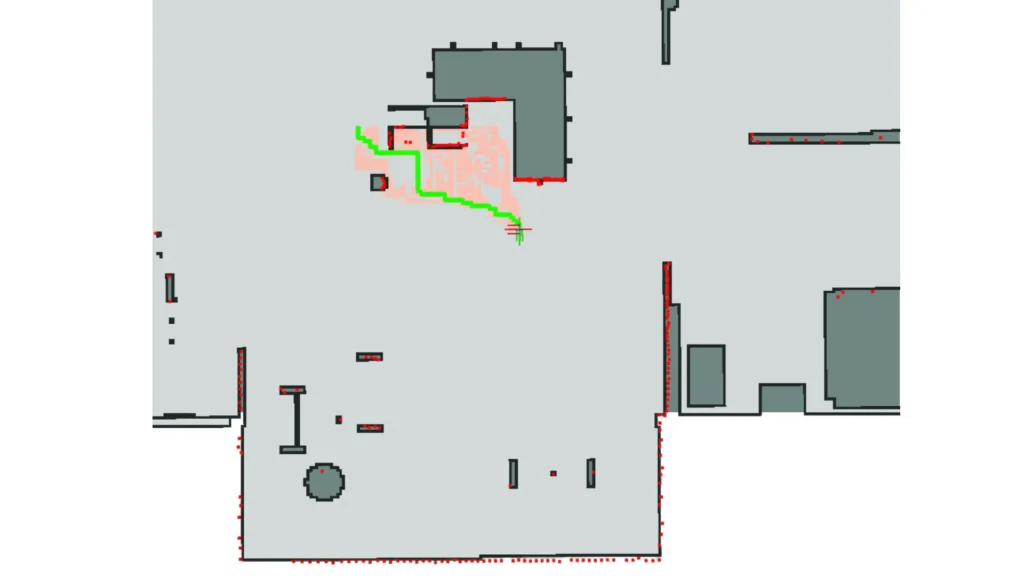
Advanced SLAM in ROS2: Mapping with Cartographer
In this tutorial, you’ll learn how to use Google’s Cartographer with ROS2 to perform advanced 2D SLAM (Simultaneous Localization and Mapping). Cartographer is a real-time SLAM algorithm that provides loop closure and accurate map construction in dynamic environments. We’ll use a simulated TurtleBot3, but the steps are adaptable to real robots. 📝 Requirements – ROS2 […]
Autonomous Navigation in ROS2 with Nav2 and Behavior Tree
In this tutorial, you will learn how to perform autonomous navigation in ROS2 using the Nav2 stack with integrated Behavior Trees (BT). The Nav2 framework provides a powerful modular system that allows robots to navigate in a known map using planning, localization, and behavior control components. 📝 Requirements – ROS2 installed (e.g., Humble or Foxy) – […]
How to Integrate ROS Control into a Simulated Robot in Gazebo

Controlling a simulated robot as if it were real — that’s the power of ROS Control. In this guide, we’ll see how to properly configure the URDF model so ROS can “command” the simulated motors of our BumperBot. 🚀 Introduction: What Is ROS Control and Why Use It? Imagine building a robot with real motors, […]
Choosing the Right Locomotion System for Mobile Robots
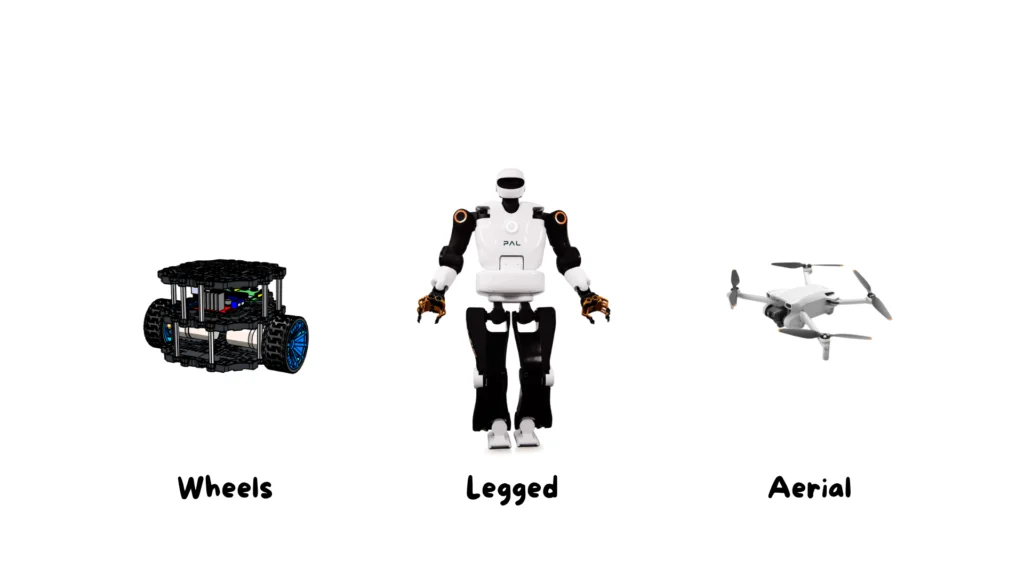
Whether it’s a four-legged robot climbing rocky hills or a drone hovering over a building site, locomotion is what gives mobile robots the power to explore, navigate, and interact with the world. But what makes one locomotion system better than another? Is there a perfect design? The answer is more nuanced than you might think. […]
Creating a 2D map with GMapping (ROS)
In this tutorial, you will learn how to build a 2D map of an environment using the GMapping SLAM algorithm in ROS1. This process is fundamental for autonomous navigation as it allows the robot to understand and represent its surroundings. 📝 Requirements – ROS1 installed (e.g., Noetic) – `slam_gmapping` package – Simulated robot with LIDAR sensor (e.g., […]
Navigation with move_base and AMCL (ROS)
In this tutorial, you will learn how to autonomously navigate a mobile robot in ROS1 using the `move_base` package for path planning and `amcl` for probabilistic localization on a prebuilt map. We will use a simulated robot (e.g., TurtleBot3) with a map previously generated using SLAM. 📝 Required components ROS1 installed (e.g., Noetic on Ubuntu […]
How to create a simple Subscriber Node with C++ – ROS2
In this tutorial, we’ll create a simple ROS 2 node in C++ that subscribes to a topic and listens for messages published on it. If you haven’t checked out the simple publisher tutorial, I recommend starting there first. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), software is organized […]