
Self Driving and ROS 2 – Learn by Doing!
Plan & Navigation

Create a ROS2 Self-Driving robot with Python and C++. Master Navigation, Planning and Decision Making with Behavior Tree. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds […]
Self Driving and ROS 2 – Learn by Doing!
Map & Localization

Create a ROS2 Self-Driving robot with Python and C++. Master Robot Localization, Mapping and SLAM. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds of robots, from […]
Path Planning using Dijkstra Algorithm
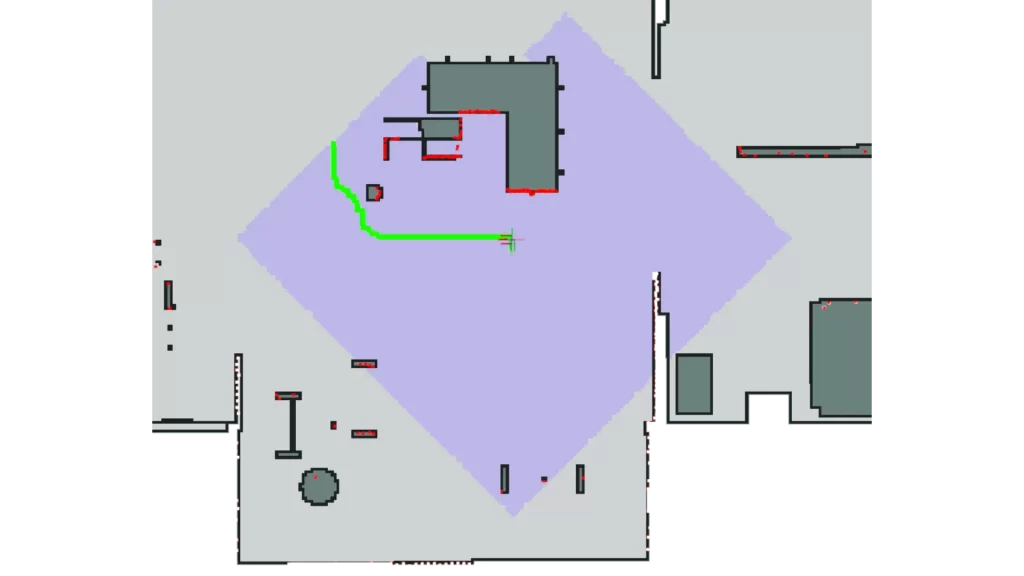
Ever stared at Google Maps, marveling at how it instantly whips up the best route through a chaotic city, rerouting on the fly for traffic jams you didn’t even know existed? We take it for granted. But this “magic” is the result of decades of work on problems that, at their core, are about finding […]