
Computer Science & Robotics – Learn by Doing! Linux to ROS 2

Master Linux, Docker, Git, and ROS 2: the Fundamental Tools to succeed as a Robotics Software Developer! Enroll Now Master the essential tools to build, simulate, and deploy modern robots. Section 1 Linux Operating System Master the foundations of Linux — the backbone of every modern robotics system! You’ll build a solid understanding of how […]
Safety in Human–Robot Interaction: Speed and Separation Monitoring with ROS 2
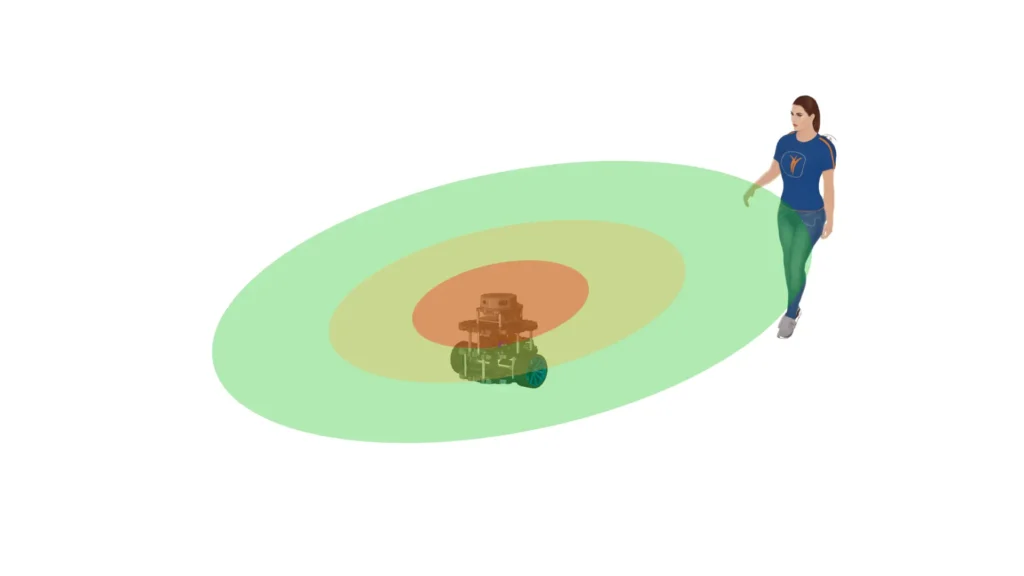
When robots and humans share the same workspace, functional safety becomes a first-class requirement. A collaborative robot must be able to adapt its motion according to the level of risk in the environment, slowing down or stopping entirely when a person comes too close.Unlike traditional setups with cages or physical barriers, this approach relies on […]
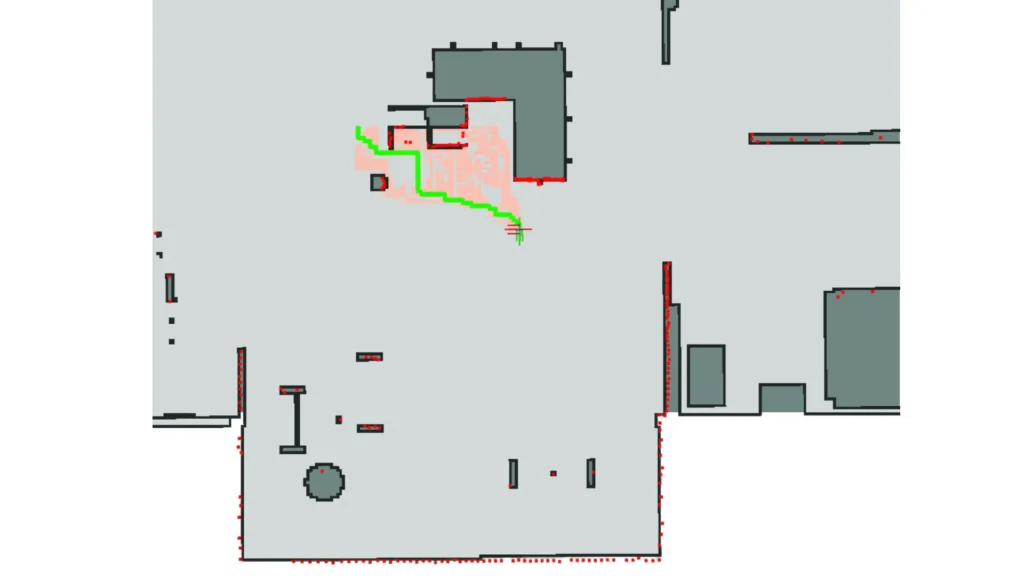
How Robots Understand Their Environment: Maps and Localization with ROS 2
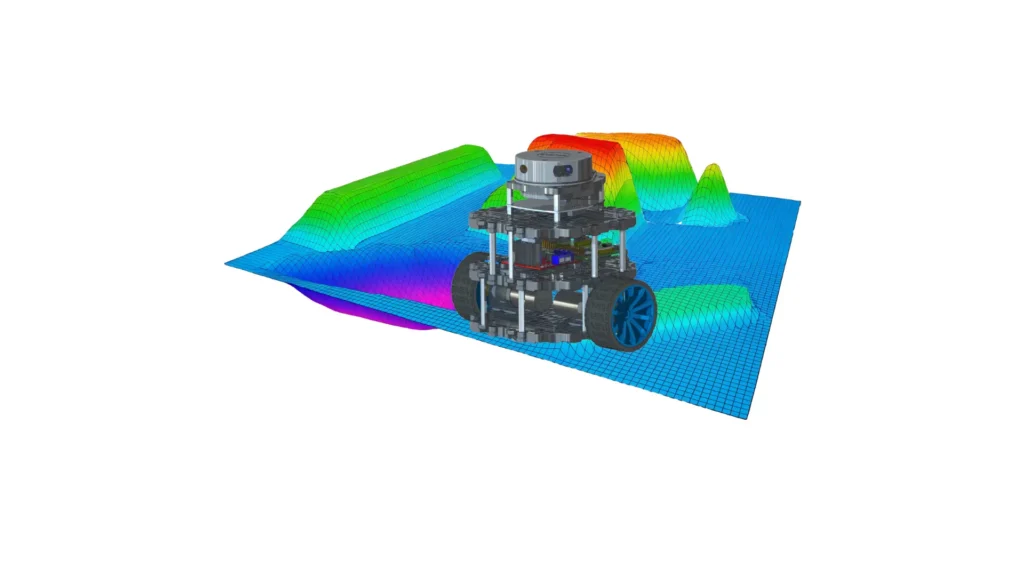
To ensure autonomous navigation capabilities, a robot must be equipped with both a localization mechanism and a representation of the environment (map).Odometry alone, based on wheel rotation measurements, is not sufficient, as it introduces cumulative errors that increase over time.Therefore, a map is required to serve as an external reference, enabling the correction of these […]
How to Build and Test a ROS 2 Service Client in C++
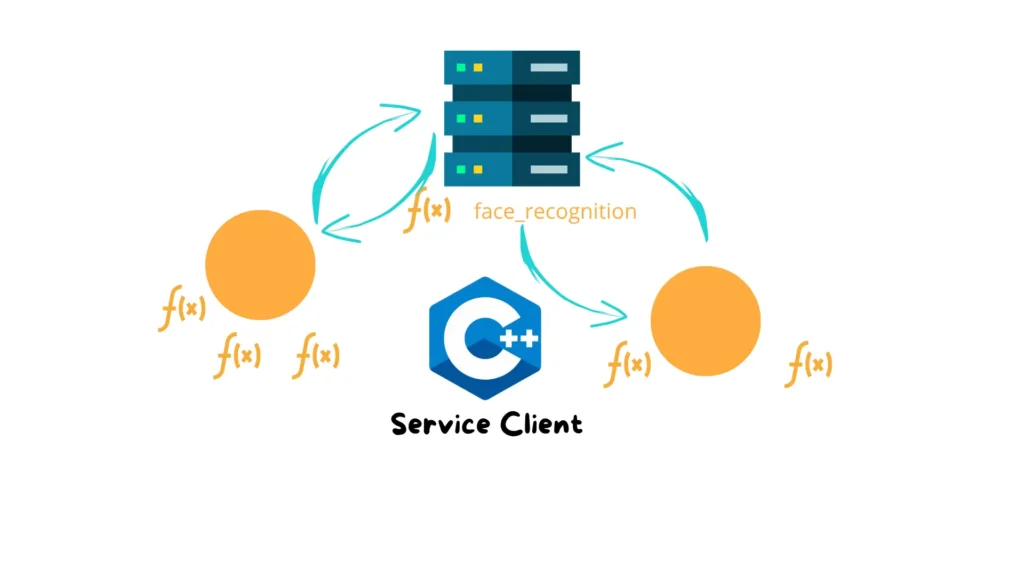
In the previous tutorial, we learned how to build a ROS 2 Service Server that takes two integers and returns their sum.Now it’s time to create the client node that sends requests to that service — this time, using C++. This tutorial will guide you through: Understanding how a ROS 2 service client works. Implementing […]
Building Smarter Robots with Behavior Trees in ROS 2
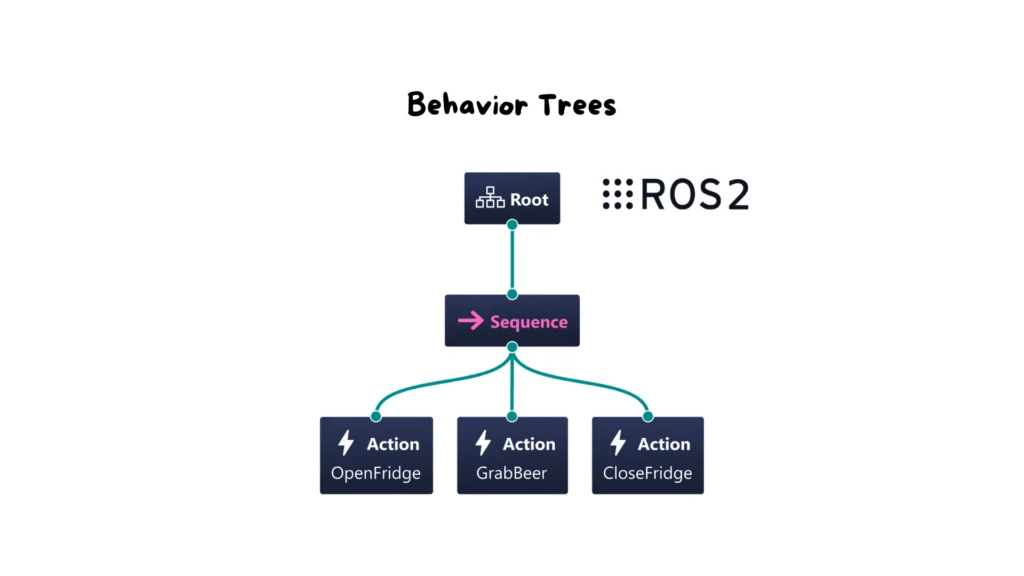
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]
How to Build and Test a ROS 2 Service Client in Python
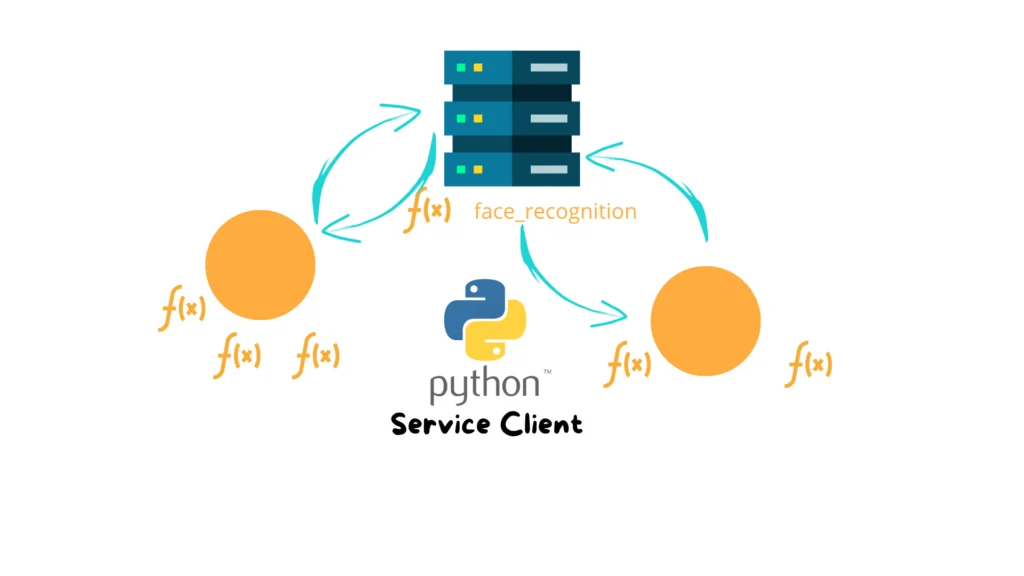
In the previous tutorial, we built a simple ROS 2 service server that takes two integers and returns their sum. Now it’s time to create a Python client node that uses this service and communicates with the server to request the calculation. 🤔 What’s a ROS 2 Service Client? A service client is a node […]
How to Build and Test a ROS 2 Service Server in C++
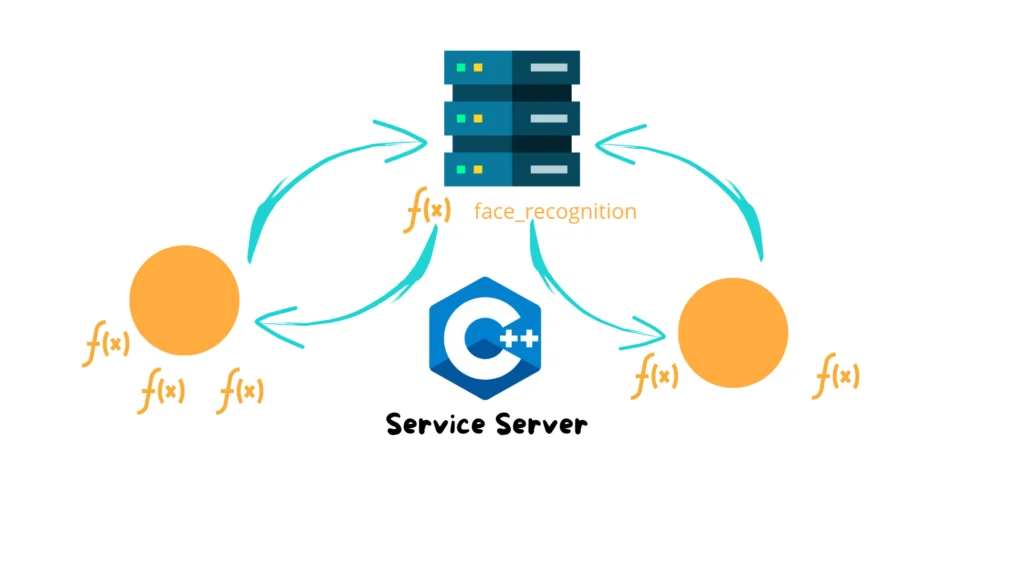
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
How to Build and Test a ROS 2 Service Server in Python
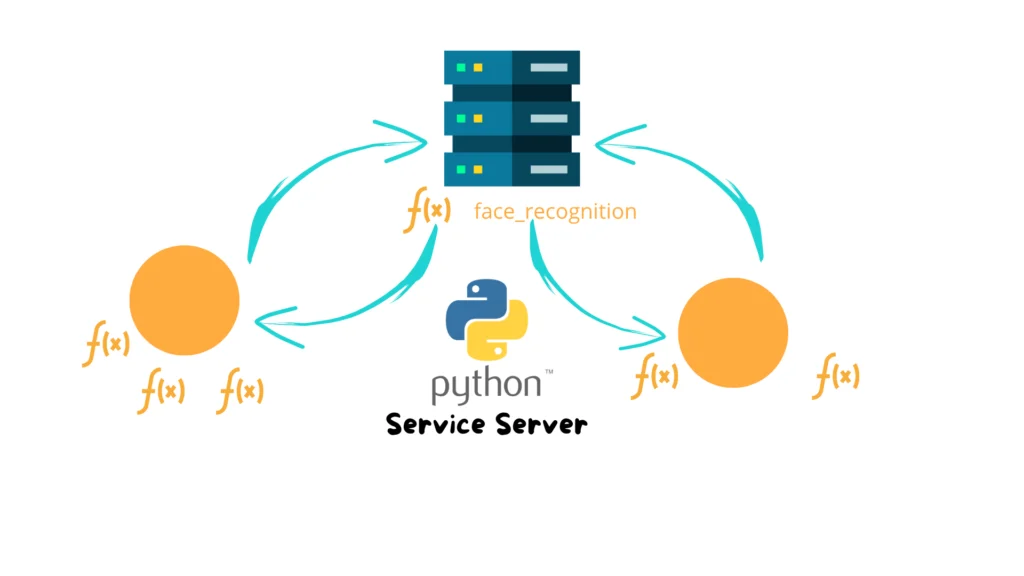
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
Smarter Path Planning in ROS 2: Implementing A* in Python
In the world of robotics, planning a path from one point to another isn’t just about finding a route—it’s about doing it intelligently. If you’ve ever implemented Dijkstra’s algorithm, you know how powerful it is… but also how slow it can be when the map gets big. What if we could be smarter? What if […]
PID Control Algorithm
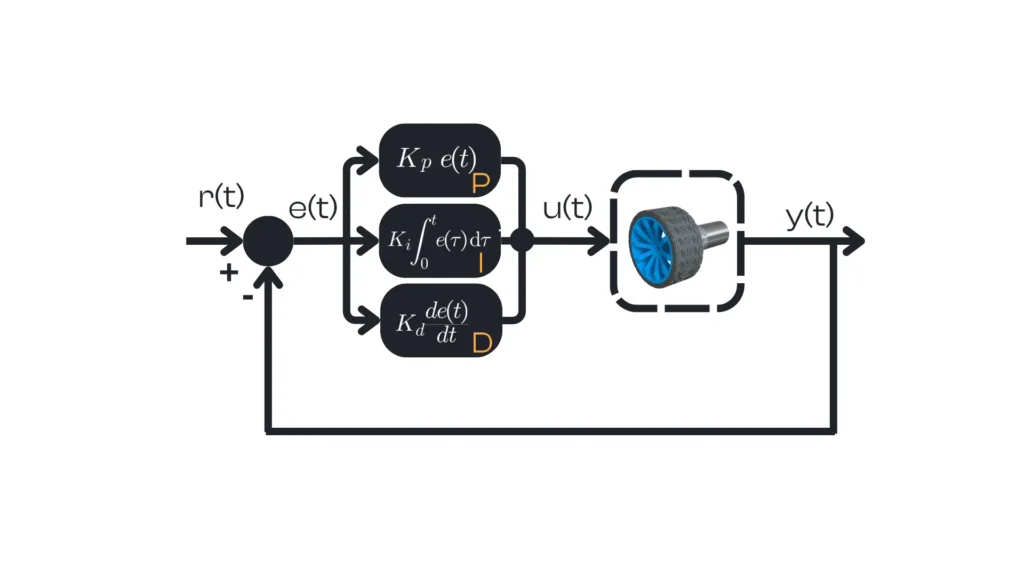
In control theory, the PID (Proportional–Integral–Derivative) algorithm is often considered the holy grail of control. PID is one of the most successful control algorithms due to its flexibility and simplicity, and it’s relatively easy to implement. In fact, the PID control algorithm has proven robust and flexible enough to yield excellent results in a wide variety […]