
How to Integrate ROS Control into a Simulated Robot in Gazebo

Controlling a simulated robot as if it were real — that’s the power of ROS Control. In this guide, we’ll see how to properly configure the URDF model so ROS can “command” the simulated motors of our BumperBot. 🚀 Introduction: What Is ROS Control and Why Use It? Imagine building a robot with real motors, […]
Choosing the Right Locomotion System for Mobile Robots
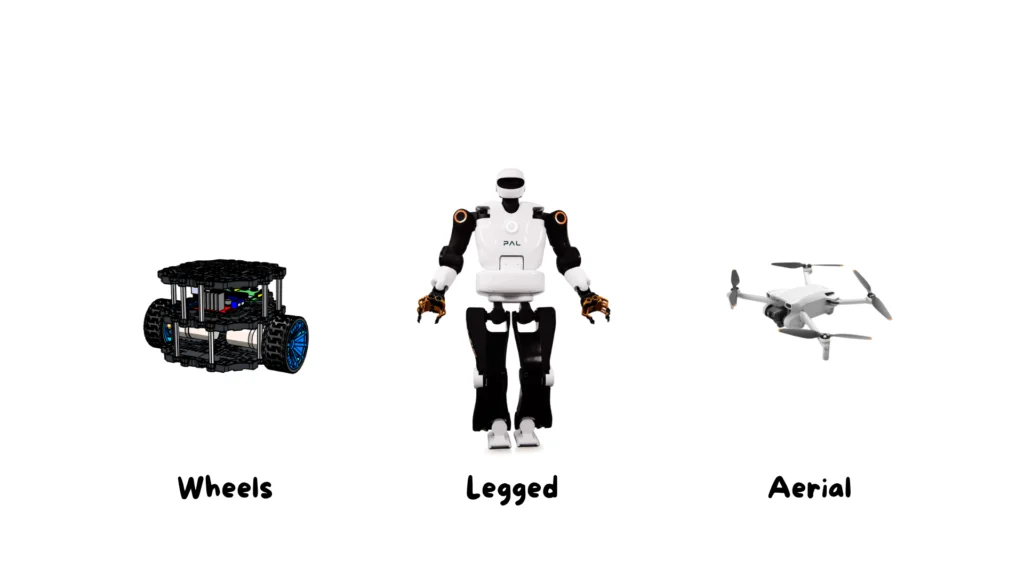
Whether it’s a four-legged robot climbing rocky hills or a drone hovering over a building site, locomotion is what gives mobile robots the power to explore, navigate, and interact with the world. But what makes one locomotion system better than another? Is there a perfect design? The answer is more nuanced than you might think. […]
How to create a simple Subscriber Node with C++ – ROS2
In this tutorial, we’ll create a simple ROS 2 node in C++ that subscribes to a topic and listens for messages published on it. If you haven’t checked out the simple publisher tutorial, I recommend starting there first. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), software is organized […]
How to create a simple Publisher Node with Python – ROS2

In this guide, we’ll build a simple publisher node using Python in ROS2.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]
How to create a simple Publisher Node with C++ – ROS2

In this tutorial, we’ll learn how to create a simple ROS2 node using C++ that sends text messages to a topic.This is one of the fundamental skills in the ROS2 ecosystem — allowing different programs (called nodes) to talk to each other via topics. 🔍 What is a ROS Node and a Topic? In ROS […]
How to create a simple Publisher Node with Python – ROS
In this guide, we’ll build a simple publisher node using Python in ROS.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]
How to create a simple Publisher Node with C++ – ROS
In this tutorial, we’ll learn how to create a simple ROS node using C++ that sends text messages to a topic.This is one of the fundamental skills in the ROS ecosystem — allowing different programs (called nodes) to talk to each other via topics. 🔍 What is a ROS Node and a Topic? In ROS […]
How to Completely Uninstall ROS2 from Ubuntu

This tutorial provides a step-by-step guide to completely uninstalling ROS2 from an Ubuntu system. It is intended for systems where ROS2 was installed via apt using the official binary installation method. Whether the goal is to switch to a different ROS2 distribution, reinstall from source, or simply remove ROS2 to clean up the development environment, […]
Pure Pursuit Controller
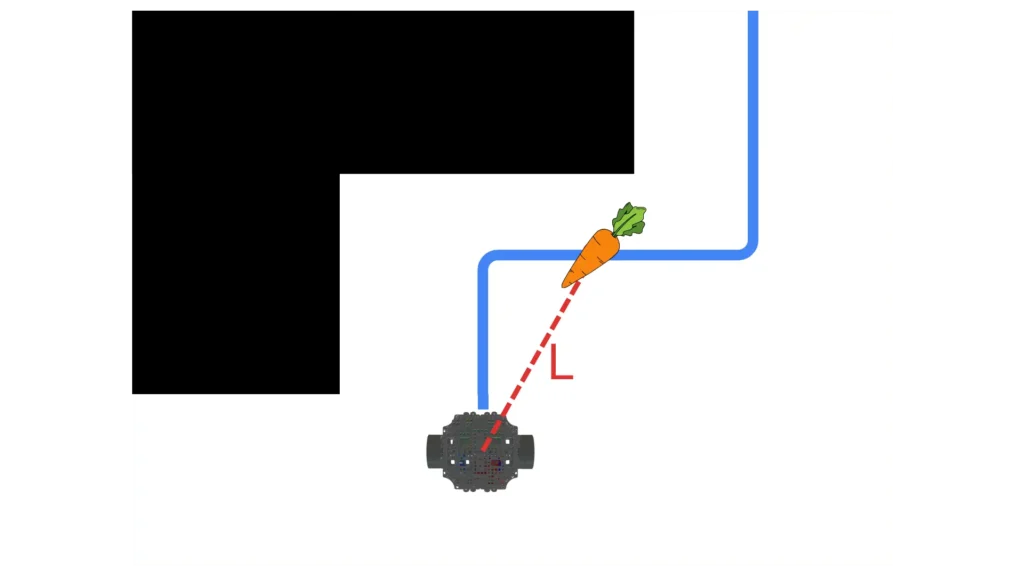
Introduction to Motion Planning Motion planning is a core component of autonomous robots that deals with finding and following a path for the robot to reach a goal safely. High-level (global) motion planners typically compute a static path through the environment, but real robots operate in dynamic environments where obstacles or conditions can change rapidly. […]
Mapping with slam_toolbox
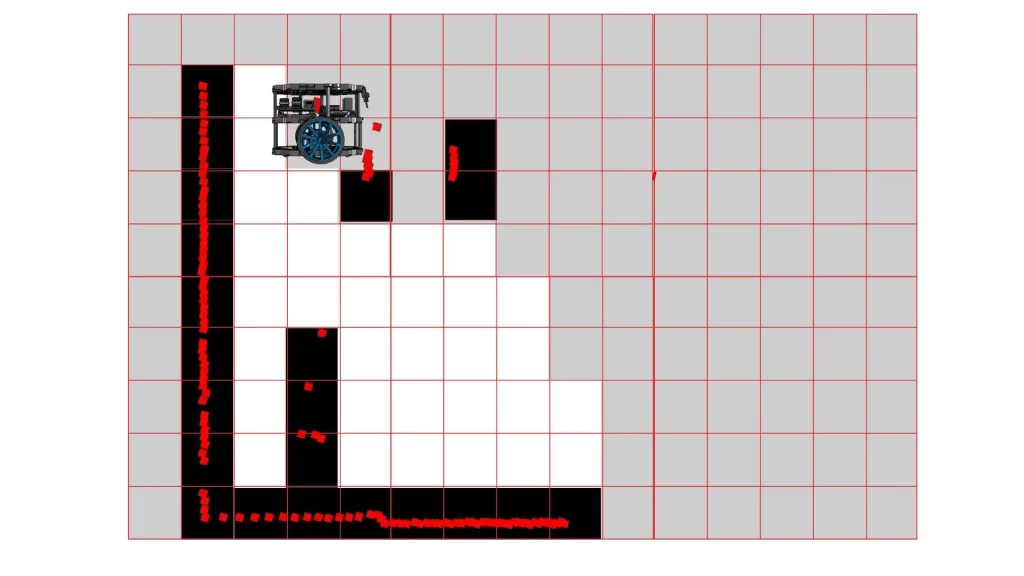
Autonomous mobile robots must both build a map of their unknown environment and localize themselves within it. Tackling mapping and localization as separate tasks often leads to drift and inconsistencies. The hard reality is: if you treat mapping and localization independently, your robot’s map will be unreliable, and localization will degrade over time. Simultaneous Localization […]