
How to Build and Test a ROS 2 Action Server in C++
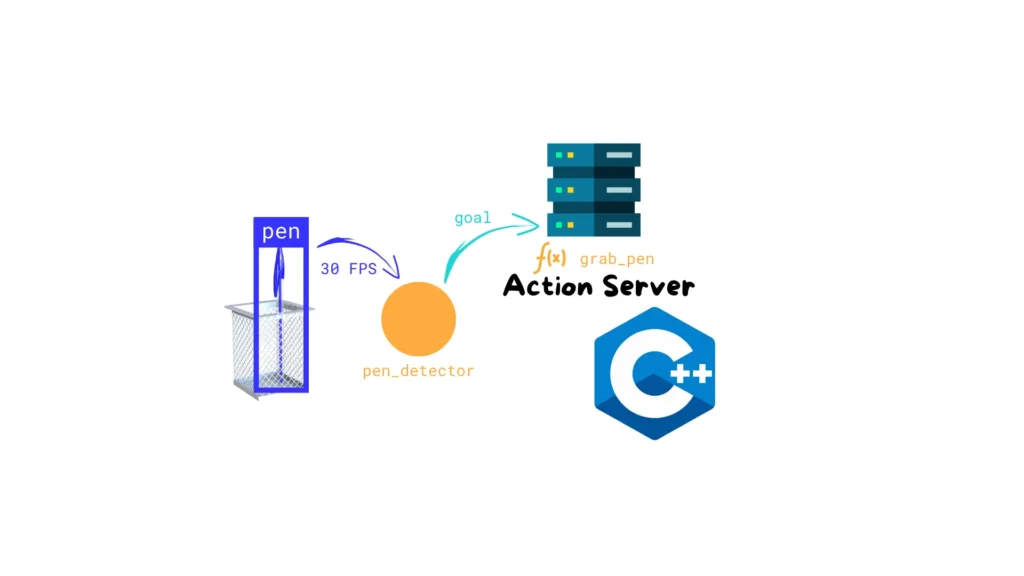
When working with robots, not every task is instantaneous. Some operations take time: navigating across a room, picking up an object, scanning an area, or performing a long computation.In ROS 2, these “long-running” tasks need a special way for nodes to talk to each other — one that allows progress updates and the ability to […]
Launching the Complete Robot Simulation in ROS 2

Up to this point, we have built and tested individual parts of our robot: the URDF description, Gazebo simulation, controllers, and even integration with MoveIt and a remote Alexa interface. Now it’s time to bring everything together into a single launch file that runs the complete robot simulation with all components working in harmony. This […]
How to Build and Test a ROS 2 Action Server in Python
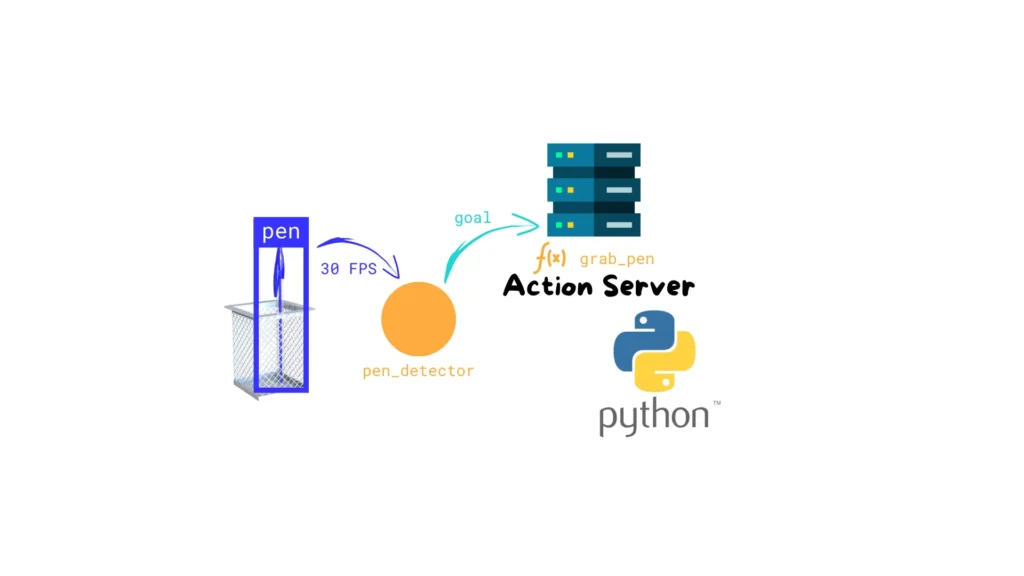
When working with robots, not every task is instantaneous. Some operations take time: navigating across a room, picking up an object, scanning an area, or performing a long computation.In ROS 2, these “long-running” tasks need a special way for nodes to talk to each other — one that allows progress updates and the ability to […]
How to Build a Voice Interaction Model in ROS 2
Voice control has become one of the most natural and intuitive ways to interact with robots. From simple voice commands to complex conversational systems, enabling a robot to understand and respond to spoken language opens the door to more human-like and user-friendly experiences. In this tutorial, we will build a Voice Interaction Model in ROS […]
How to Build and Test a ROS 2 Service Client in C++
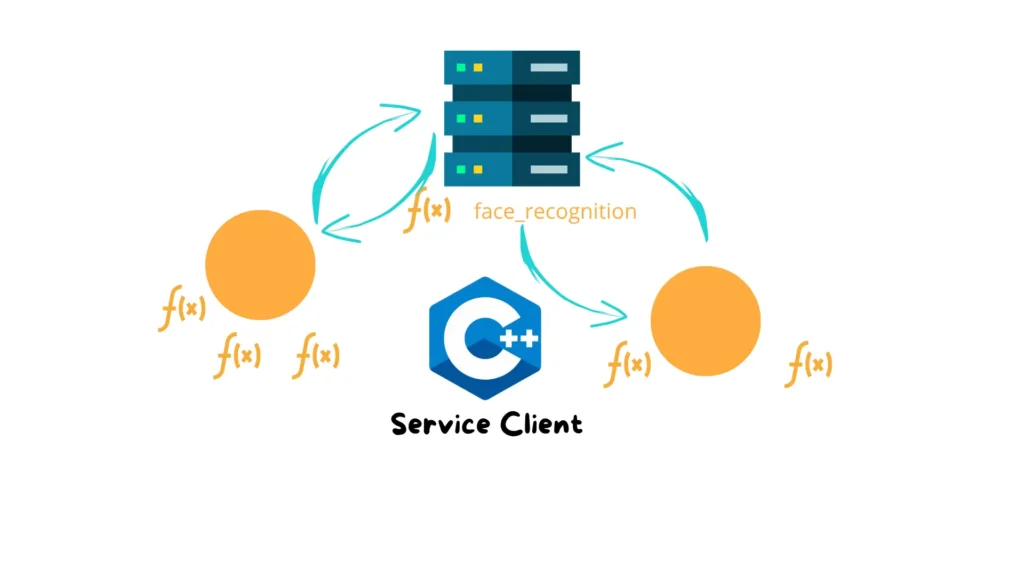
In the previous tutorial, we learned how to build a ROS 2 Service Server that takes two integers and returns their sum.Now it’s time to create the client node that sends requests to that service — this time, using C++. This tutorial will guide you through: Understanding how a ROS 2 service client works. Implementing […]
Building Smarter Robots with Behavior Trees in ROS 2
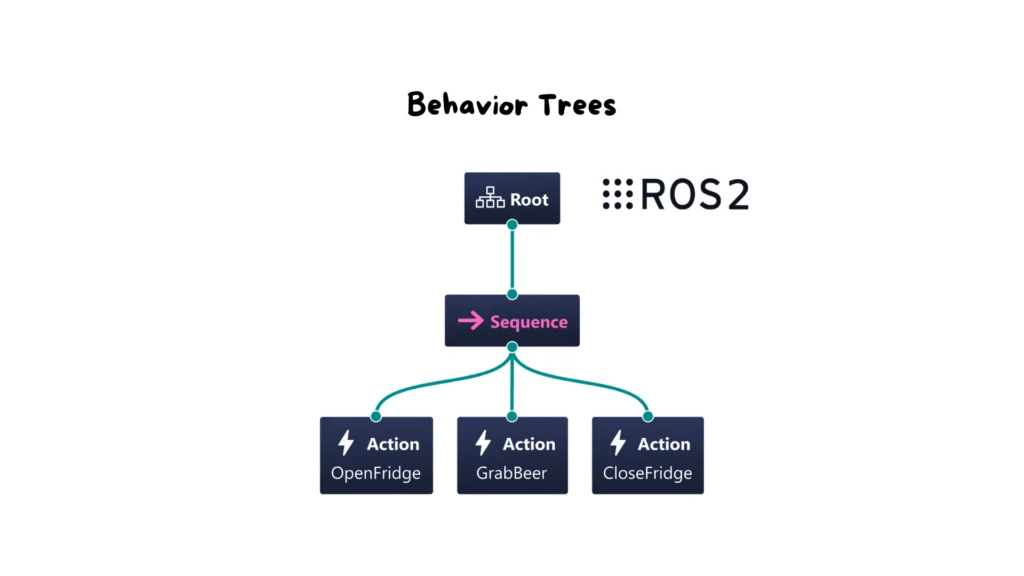
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]
How to Build and Test a ROS 2 Service Client in Python
In the previous tutorial, we built a simple ROS 2 service server that takes two integers and returns their sum. Now it’s time to create a Python client node that uses this service and communicates with the server to request the calculation. 🤔 What’s a ROS 2 Service Client? A service client is a node […]
How to Build and Test a ROS 2 Service Server in C++
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
How to Build and Test a ROS 2 Service Server in Python
In robotics, especially with ROS 2, it’s common for different nodes to interact and collaborate to accomplish tasks. So far, we’ve used the publisher/subscriber model to communicate between them — which works well for data streaming. But what if you just need to trigger a specific operation and get a result back? That’s where Services […]
Smarter Path Planning in ROS 2: Implementing A* in Python
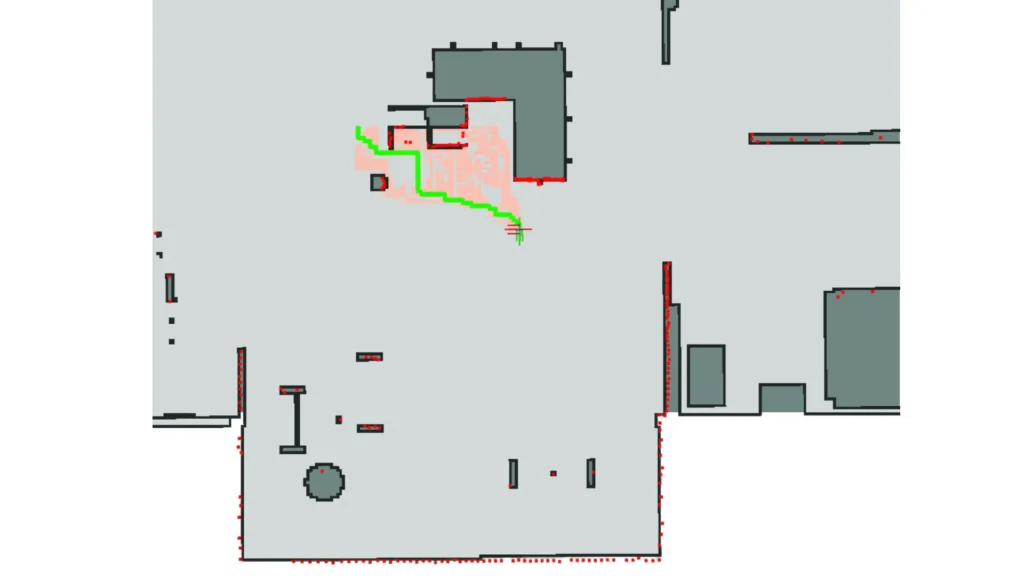
In the world of robotics, planning a path from one point to another isn’t just about finding a route—it’s about doing it intelligently. If you’ve ever implemented Dijkstra’s algorithm, you know how powerful it is… but also how slow it can be when the map gets big. What if we could be smarter? What if […]