
PID Control Algorithm
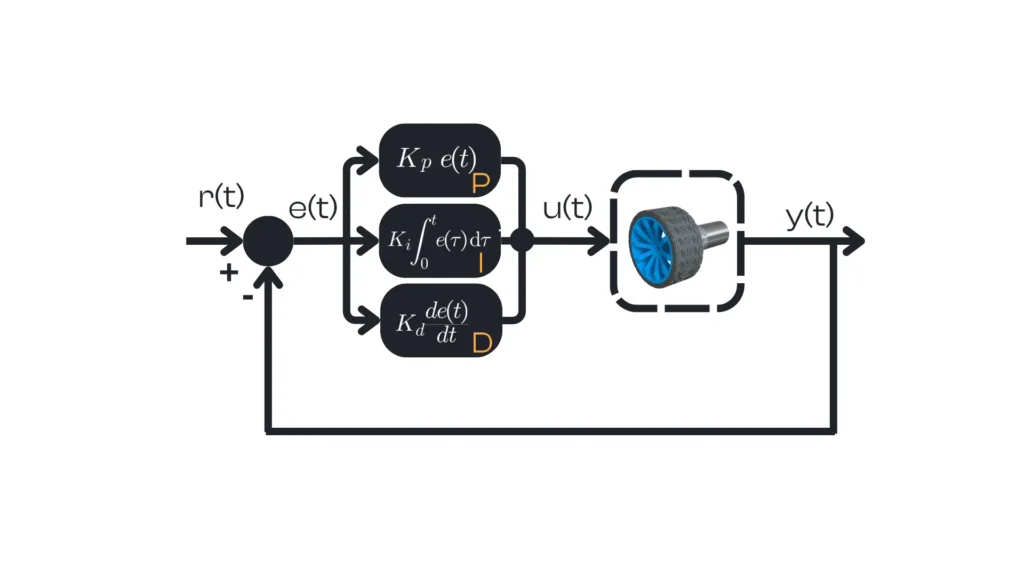
In control theory, the PID (Proportional–Integral–Derivative) algorithm is often considered the holy grail of control. PID is one of the most successful control algorithms due to its flexibility and simplicity, and it’s relatively easy to implement. In fact, the PID control algorithm has proven robust and flexible enough to yield excellent results in a wide variety […]
How to Integrate ROS Control into a Simulated Robot in Gazebo

Controlling a simulated robot as if it were real — that’s the power of ROS Control. In this guide, we’ll see how to properly configure the URDF model so ROS can “command” the simulated motors of our BumperBot. 🚀 Introduction: What Is ROS Control and Why Use It? Imagine building a robot with real motors, […]
Choosing the Right Locomotion System for Mobile Robots
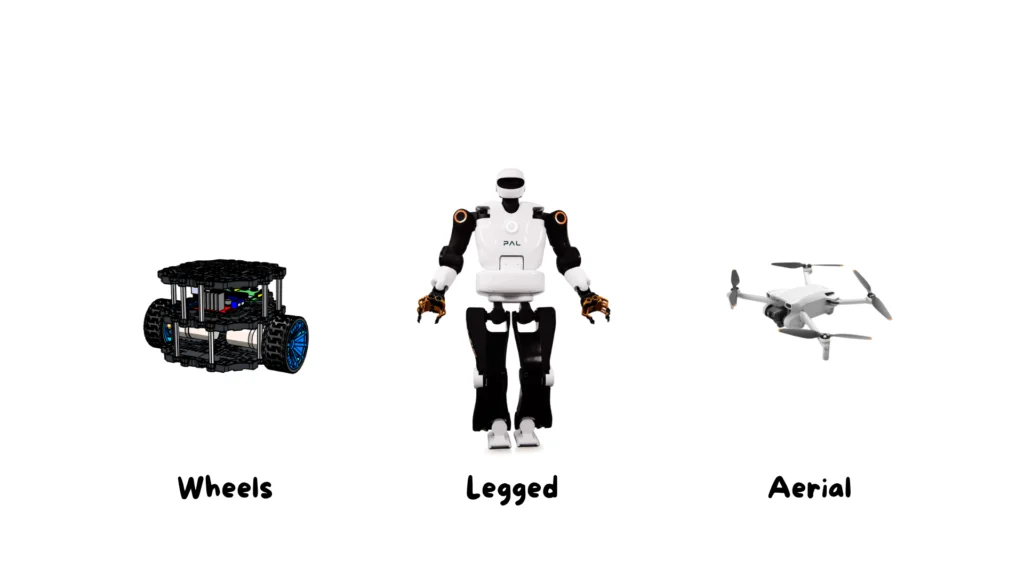
Whether it’s a four-legged robot climbing rocky hills or a drone hovering over a building site, locomotion is what gives mobile robots the power to explore, navigate, and interact with the world. But what makes one locomotion system better than another? Is there a perfect design? The answer is more nuanced than you might think. […]
How to create a simple Subscriber Node with C++ – ROS2
In this tutorial, we’ll create a simple ROS 2 node in C++ that subscribes to a topic and listens for messages published on it. If you haven’t checked out the simple publisher tutorial, I recommend starting there first. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), software is organized […]
How to create a simple Publisher Node with Python – ROS2

In this guide, we’ll build a simple publisher node using Python in ROS2.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]
How to create a simple Publisher Node with C++ – ROS2

In this tutorial, we’ll learn how to create a simple ROS2 node using C++ that sends text messages to a topic.This is one of the fundamental skills in the ROS2 ecosystem — allowing different programs (called nodes) to talk to each other via topics. 🔍 What is a ROS Node and a Topic? In ROS […]
ROS vs ROS 2: What’s the Difference, Which One to Use
If you’re working in robotics — or thinking about it — chances are you’ve come across ROS and ROS 2. These are two of the most widely used open-source frameworks for building, controlling, and connecting complex robots.But what’s the real difference between the two? And which one should you choose today? 📖 How ROS and […]
How to create a simple Publisher Node with Python – ROS
In this guide, we’ll build a simple publisher node using Python in ROS.The node will periodically publish a string message on a topic. We’ll explain every step clearly and line-by-line, so even if you’re new to ROS you can follow along. 🔍 What is a ROS Node and a Topic? In ROS (Robot Operating System), […]
How to create a simple Publisher Node with C++ – ROS
In this tutorial, we’ll learn how to create a simple ROS node using C++ that sends text messages to a topic.This is one of the fundamental skills in the ROS ecosystem — allowing different programs (called nodes) to talk to each other via topics. 🔍 What is a ROS Node and a Topic? In ROS […]
How to create a ROS2 Workspace

If you’re getting started with ROS 2 on Ubuntu 24.04 LTS, one of the very first things you’ll need to do is create a workspace. A workspace is simply a folder where you keep all your ROS 2 packages, build them, and manage your development environment. In this guide, we’ll walk through — step by […]