
How to Completely Uninstall ROS2 from Ubuntu

This tutorial provides a step-by-step guide to completely uninstalling ROS2 from an Ubuntu system. It is intended for systems where ROS2 was installed via apt using the official binary installation method. Whether the goal is to switch to a different ROS2 distribution, reinstall from source, or simply remove ROS2 to clean up the development environment, […]
Installing ROS 2 Jazzy on Ubuntu 24.04: Step-by-Step Tutorial
If you’ve recently installed Ubuntu 24.04 and are ready to start working with robotics software, one of the first tools you’ll want to set up is ROS 2 Jazzy. This is the latest official version of the Robot Operating System 2 (ROS 2) tailored for Ubuntu 24.04. In this guide, you’ll learn exactly how to […]
Pure Pursuit Controller
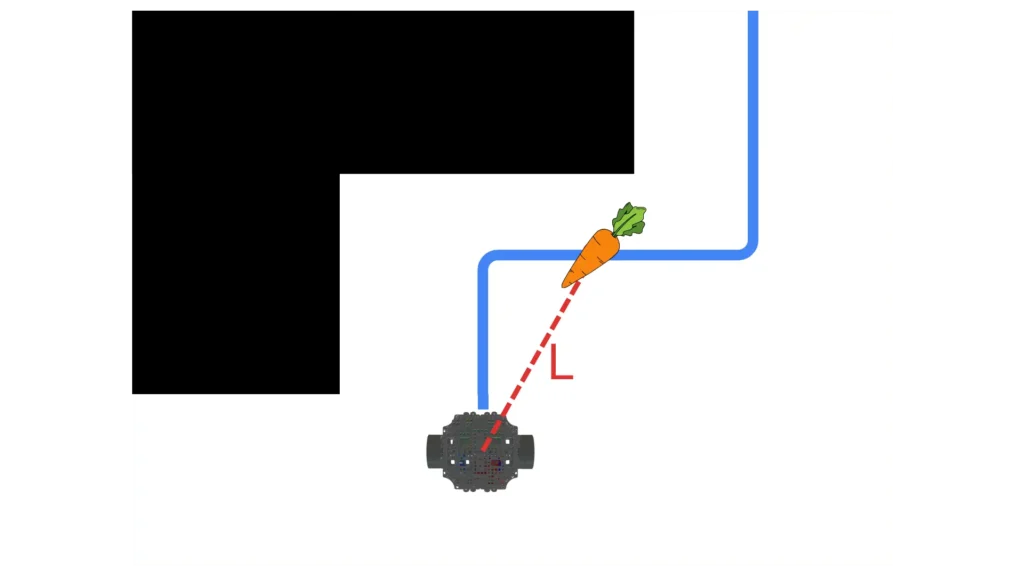
Introduction to Motion Planning Motion planning is a core component of autonomous robots that deals with finding and following a path for the robot to reach a goal safely. High-level (global) motion planners typically compute a static path through the environment, but real robots operate in dynamic environments where obstacles or conditions can change rapidly. […]
Mapping with slam_toolbox
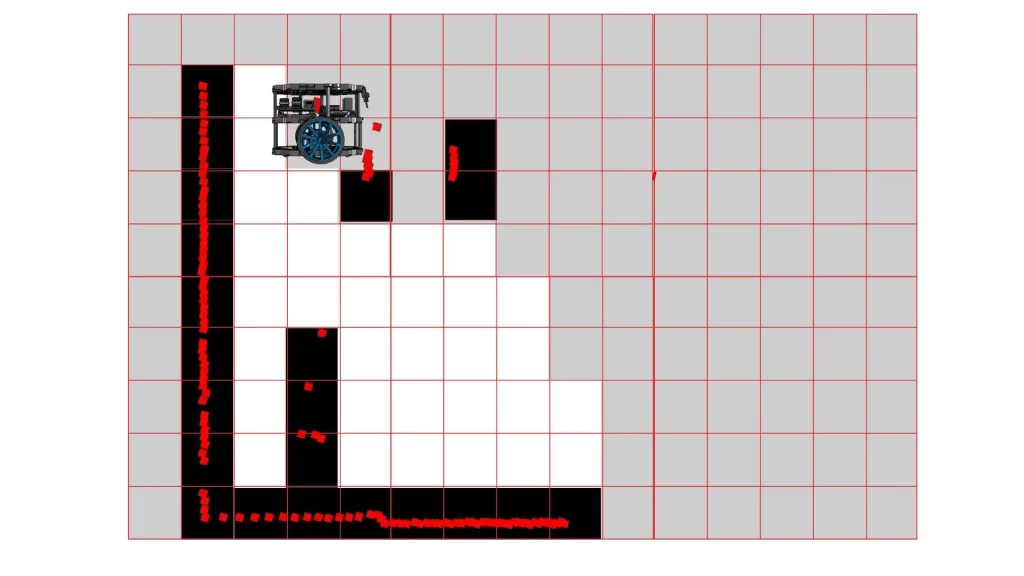
Autonomous mobile robots must both build a map of their unknown environment and localize themselves within it. Tackling mapping and localization as separate tasks often leads to drift and inconsistencies. The hard reality is: if you treat mapping and localization independently, your robot’s map will be unreliable, and localization will degrade over time. Simultaneous Localization […]
Robotics and ROS 2 – Learn by Doing!
Manipulators

Create a ROS2 Manipulator Robot with Python and C++. Master Robot Control and MoveIt and use Alexa to move your robot. Enroll Now Get Started with Manipulator Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building […]
Self Driving and ROS – Learn by Doing!
Odometry & Control

Create a Self-Driving robot and learn about Robot Localization and Sensor Fusion using Kalman Filters. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds of robots, from […]
Robotics and ROS – Learn by Doing!
Manipulators

Create a ROS Manipulator Robot with Python and C++. Master Robot Control and MoveIt and use Alexa to move your robot. Enroll Now Get Started with Manipulator Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building […]
Self Driving and ROS 2 – Learn by Doing!
Odometry & Control

Create a ROS2 Self-Driving robot with Python and C++. Master Odometry, Control and Sensor Fusion using Kalman Filters. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds […]
Self Driving and ROS 2 – Learn by Doing!
Plan & Navigation

Create a ROS2 Self-Driving robot with Python and C++. Master Navigation, Planning and Decision Making with Behavior Tree. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds […]
Self Driving and ROS 2 – Learn by Doing!
Map & Localization

Create a ROS2 Self-Driving robot with Python and C++. Master Robot Localization, Mapping and SLAM. Enroll Now Get Started with Autonomous Mobile Robots Section 1 Introduction to ROS 2 Get started with ROS 2, the latest version of Robot Operating System! ROS is the most widely used framework for building all kinds of robots, from […]