
Safety in Human–Robot Interaction: Speed and Separation Monitoring with ROS 2
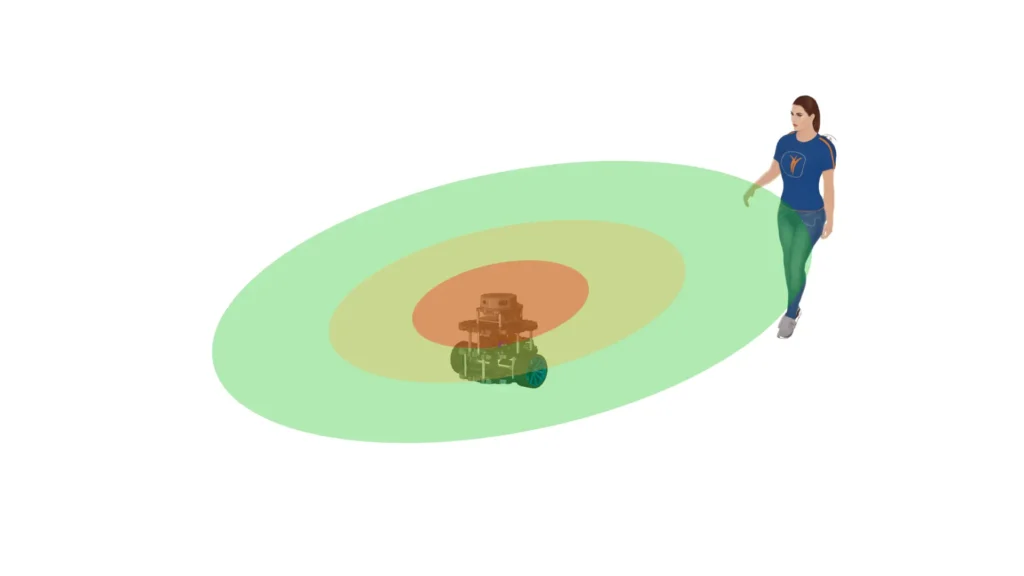
When robots and humans share the same workspace, functional safety becomes a first-class requirement. A collaborative robot must be able to adapt its motion according to the level of risk in the environment, slowing down or stopping entirely when a person comes too close.Unlike traditional setups with cages or physical barriers, this approach relies on […]
Integrating a 2D LiDAR into Your ROS 2 Robot Model

One of the key elements that enables a mobile robot to navigate autonomously is its ability to perceive the surrounding environment.Among the most widespread and reliable sensors used in robotics is the 2D LiDAR (Light Detection and Ranging). This device has revolutionized mobile robotics thanks to its accuracy and the ease with which it can […]
How to Build and Test a ROS 2 Action Client in Python
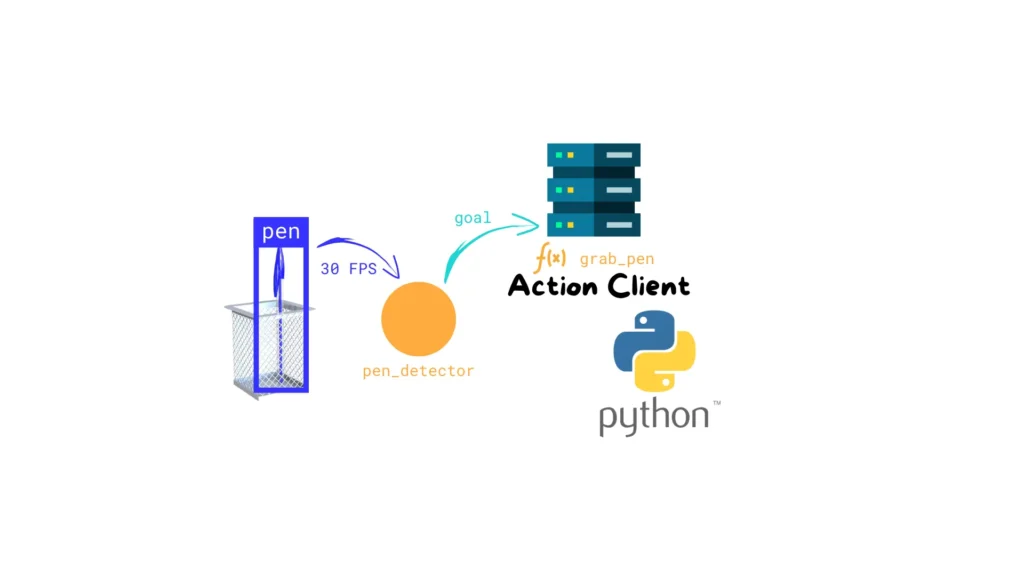
In the previous article, we implemented a ROS 2 Action Server in Python that calculates the Fibonacci sequence. We also saw how to interact with it using the ROS 2 CLI (ros2 action send_goal). Now, we’ll take a step further and implement a ROS 2 Action Client in Python.This client node will connect directly to […]
How to Build and Test a ROS 2 Action Server in C++
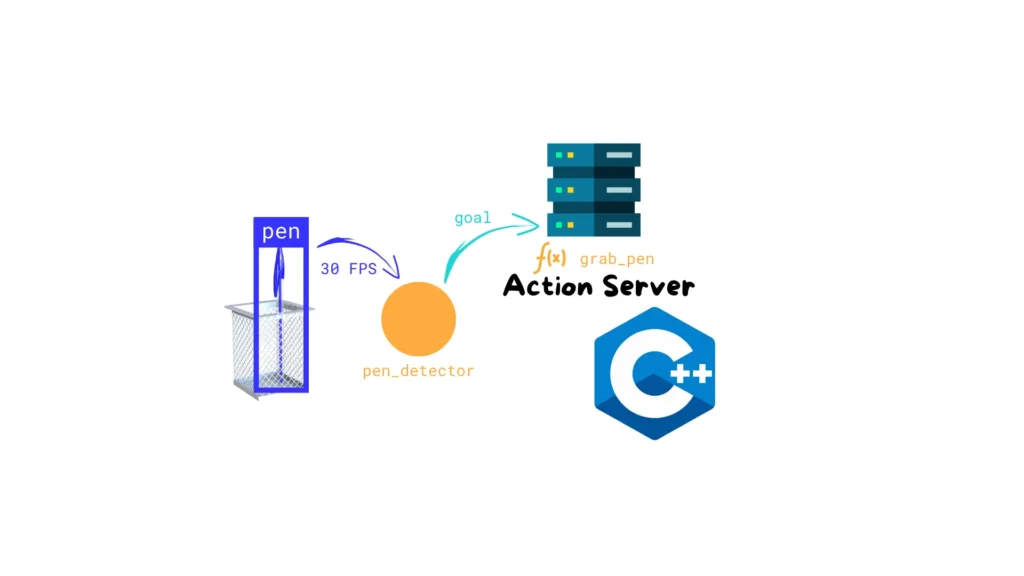
When working with robots, not every task is instantaneous. Some operations take time: navigating across a room, picking up an object, scanning an area, or performing a long computation.In ROS 2, these “long-running” tasks need a special way for nodes to talk to each other — one that allows progress updates and the ability to […]
How to Build and Test a ROS 2 Action Server in Python
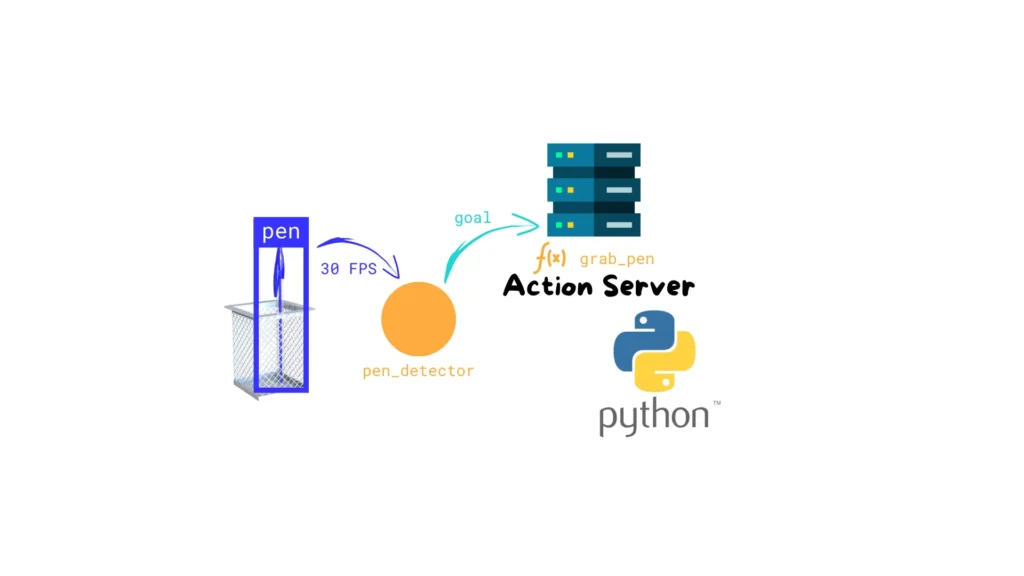
When working with robots, not every task is instantaneous. Some operations take time: navigating across a room, picking up an object, scanning an area, or performing a long computation.In ROS 2, these “long-running” tasks need a special way for nodes to talk to each other — one that allows progress updates and the ability to […]
How to Interface Your ROS 2 Robot with Alexa Using Flask and Python

👉 How to Interface Your ROS 2 Robot with Alexa Using Flask and Python In this hands-on lab, you’ll learn how to create a Python web server that acts as a bridge between an Alexa Skill and your ROS 2 robot. By using Flask and the Alexa Skills Kit SDK, you will interpret voice commands […]
Building Smarter Robots with Behavior Trees in ROS 2
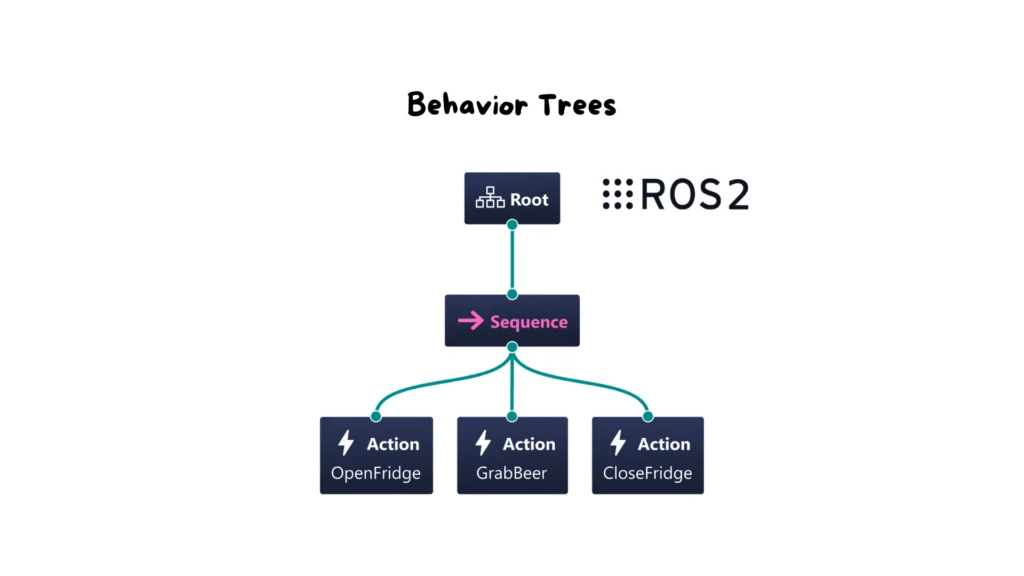
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]
How to Link Your Alexa Skill to a Local ROS 2 Server Using ngrok
👉 How to Link Your Alexa Skill to a Local ROS 2 Server Using ngrok In this tutorial, you’ll learn how to connect the Alexa Skill you previously created to a local ROS 2 server using ngrok. This setup will allow your voice commands to travel from Amazon’s cloud to your machine, where they can […]
Control Your ROS 2 Robot with Alexa

In this guide, you’ll learn how to connect your ROS 2 robot to Amazon Alexa using the internet. This connection enables you to control your robot with voice commands using custom Alexa Skills, without requiring a physical Alexa device. We’ll use the ASK SDK, ngrok, and ROS 2 action servers to complete the setup. By […]
Install Ubuntu 22.04 on a Virtual Machine with VirtualBox

If you’re new to Linux or want to explore Ubuntu without modifying your main operating system, a Virtual Machine (VM) is the perfect solution. This guide will walk you through installing Ubuntu 22.04 inside Oracle VM VirtualBox. You’ll learn how to set it up safely, efficiently, and without needing to dual-boot your system. Whether you’re […]