
Building Smarter Robots with Behavior Trees in ROS 2
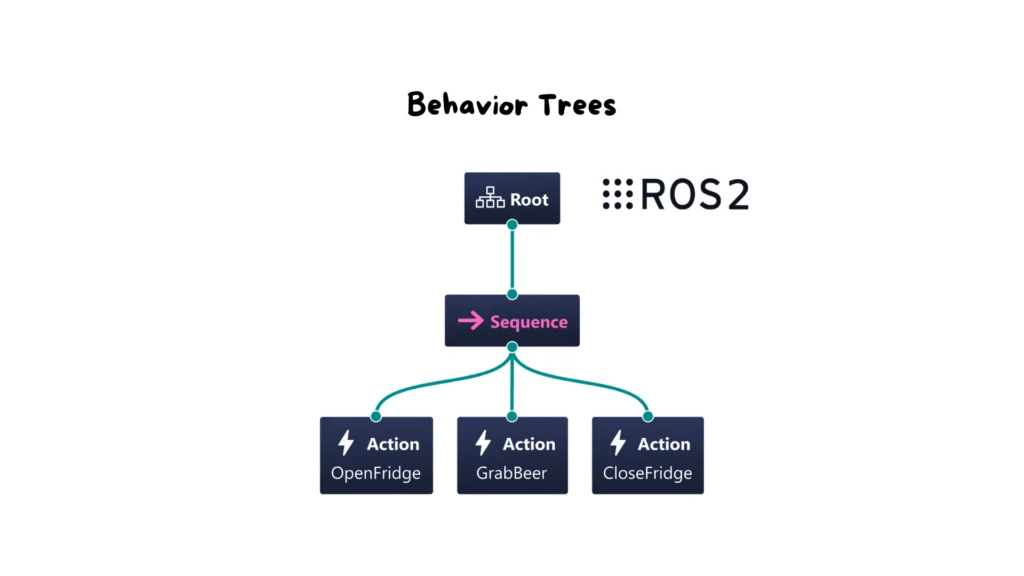
Discover how Behavior Trees can help you structure intelligent robot behaviors in ROS 2 using modular logic, clear control flow, and intuitive tools like Groot. 🤖 Why Behavior Matters in Robotics Robots that operate in the real world face much more than just navigation tasks. They need to handle dynamic environments, unpredictable humans, and ambiguous […]
How to Develop a Custom Alexa Skill to Control Your ROS 2 Robot

👉 How to Develop a Custom Alexa Skill to Control Your ROS 2 Robot In this step-by-step lab, you’ll learn how to create a custom Alexa Skill from scratch that can send commands to your ROS 2 robot. We’ll use the Alexa Developer Console to define intents and invocation phrases, and configure the skill to […]
Install Ubuntu 22.04 on a Virtual Machine with VirtualBox

If you’re new to Linux or want to explore Ubuntu without modifying your main operating system, a Virtual Machine (VM) is the perfect solution. This guide will walk you through installing Ubuntu 22.04 inside Oracle VM VirtualBox. You’ll learn how to set it up safely, efficiently, and without needing to dual-boot your system. Whether you’re […]
Navigazione waypoint ROS2 con ripianificazione dinamica tramite Nav2
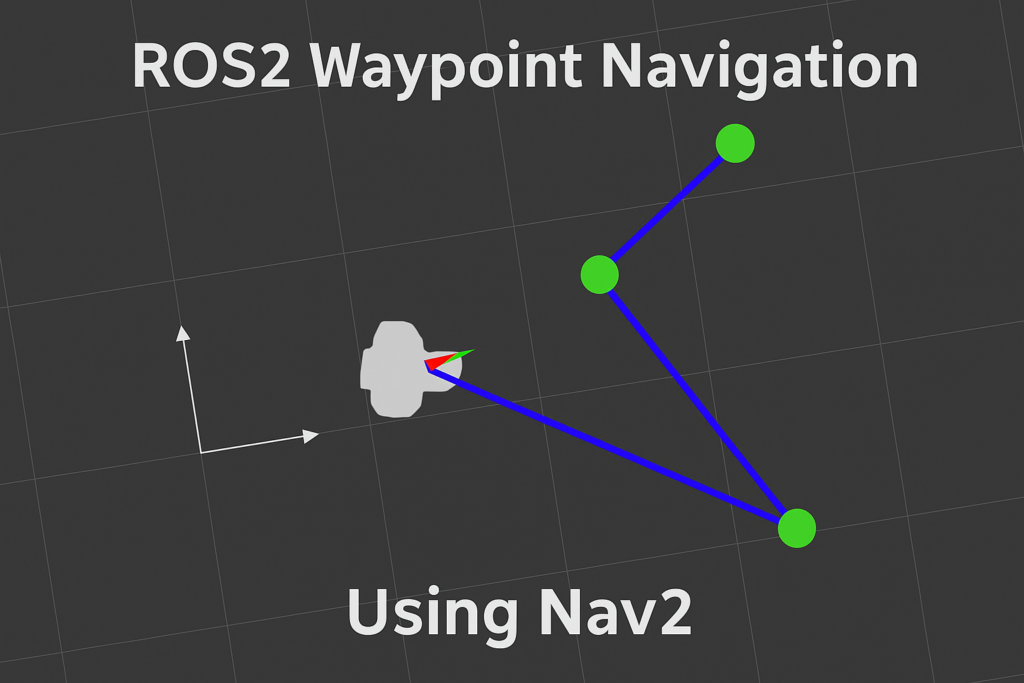
In this tutorial, you’ll learn how to implement waypoint-based navigation in ROS2 using the Nav2 stack, enhanced with dynamic replanning capabilities. This setup enables your robot to follow a sequence of predefined goals and recalculate the path if unexpected obstacles appear. It’s ideal for autonomous patrol or area coverage in indoor environments. 📝 Requirements – […]
Advanced SLAM in ROS2: Mapping with Cartographer
In this tutorial, you’ll learn how to use Google’s Cartographer with ROS2 to perform advanced 2D SLAM (Simultaneous Localization and Mapping). Cartographer is a real-time SLAM algorithm that provides loop closure and accurate map construction in dynamic environments. We’ll use a simulated TurtleBot3, but the steps are adaptable to real robots. 📝 Requirements – ROS2 […]
Autonomous Navigation in ROS2 with Nav2 and Behavior Tree
In this tutorial, you will learn how to perform autonomous navigation in ROS2 using the Nav2 stack with integrated Behavior Trees (BT). The Nav2 framework provides a powerful modular system that allows robots to navigate in a known map using planning, localization, and behavior control components. 📝 Requirements – ROS2 installed (e.g., Humble or Foxy) – […]
Creating a 2D map with GMapping (ROS)
In this tutorial, you will learn how to build a 2D map of an environment using the GMapping SLAM algorithm in ROS1. This process is fundamental for autonomous navigation as it allows the robot to understand and represent its surroundings. 📝 Requirements – ROS1 installed (e.g., Noetic) – `slam_gmapping` package – Simulated robot with LIDAR sensor (e.g., […]
Navigation with move_base and AMCL (ROS)
In this tutorial, you will learn how to autonomously navigate a mobile robot in ROS1 using the `move_base` package for path planning and `amcl` for probabilistic localization on a prebuilt map. We will use a simulated robot (e.g., TurtleBot3) with a map previously generated using SLAM. 📝 Required components ROS1 installed (e.g., Noetic on Ubuntu […]
ROS vs ROS 2: What’s the Difference, Which One to Use
If you’re working in robotics — or thinking about it — chances are you’ve come across ROS and ROS 2. These are two of the most widely used open-source frameworks for building, controlling, and connecting complex robots.But what’s the real difference between the two? And which one should you choose today? 📖 How ROS and […]
How to create a ROS2 Workspace

If you’re getting started with ROS 2 on Ubuntu 24.04 LTS, one of the very first things you’ll need to do is create a workspace. A workspace is simply a folder where you keep all your ROS 2 packages, build them, and manage your development environment. In this guide, we’ll walk through — step by […]