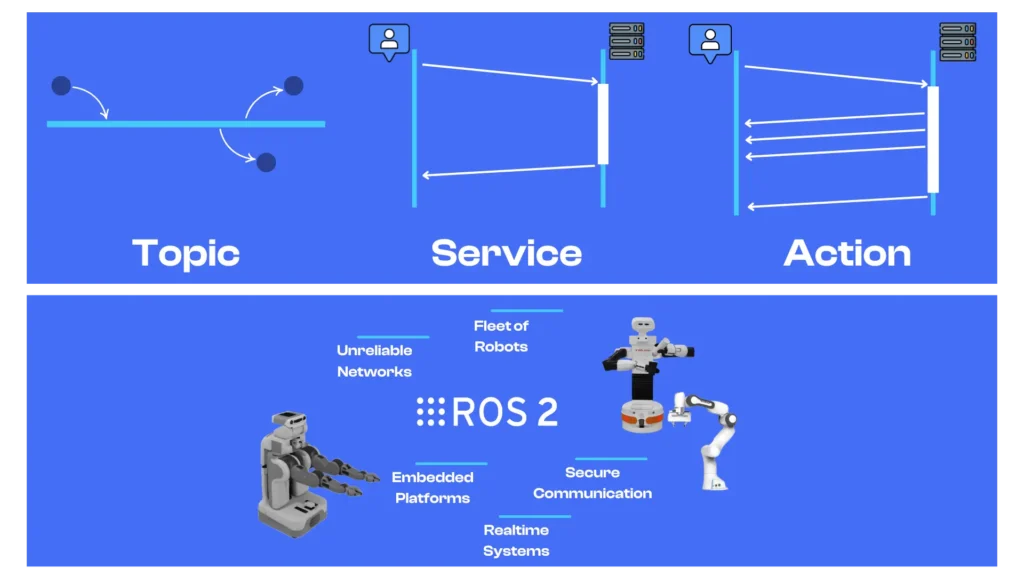
Get started with ROS 2, the latest version of Robot Operating System!
ROS is the most widely used framework for building all kinds of robots, from Manipulators, Autonomous mobile robots, Humanoids and Quadrupeds.
You won’t just learn theory! You’ll get your hands dirty, setting up a professional development environment and understanding the core concepts that power today’s most advanced robotic systems.
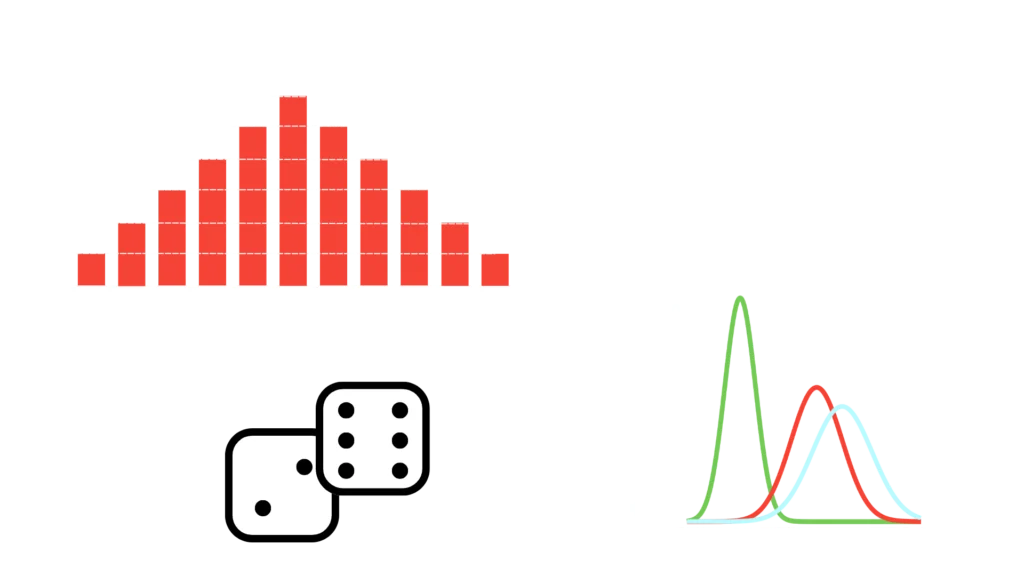
Understanding the role of probability in robotics is key to making them think intelligently.
Learn how to model uncertainty, estimate states, and make decisions when data is incomplete or ambiguous.
From basic probability distributions to Bayesian inference, you’ll gain the mathematical intuition that powers localization, mapping, and sensor fusion in modern robotics.
Understand how robots estimate their motion over time using the Odometry Motion Model, the foundation of mobile robot navigation.
Learn how to model real-world motion, incorporate uncertainty, and predict where your robot will be after executing a movement.
You’ll build mathematical and practical intuition for probabilistic motion models — essential for accurate localization, mapping, and trajectory tracking in autonomous systems.
Discover how different sensors allow robots to perceive and understand the world around them. Learn how LIDAR, IMU, and Cameras work together to enable accurate localization and mapping — the foundation of autonomous navigation.
Understand the strengths and limitations of each sensor, and learn how to integrate them into your ROS 2 system to create a complete perception stack capable of operating in real-world environments.
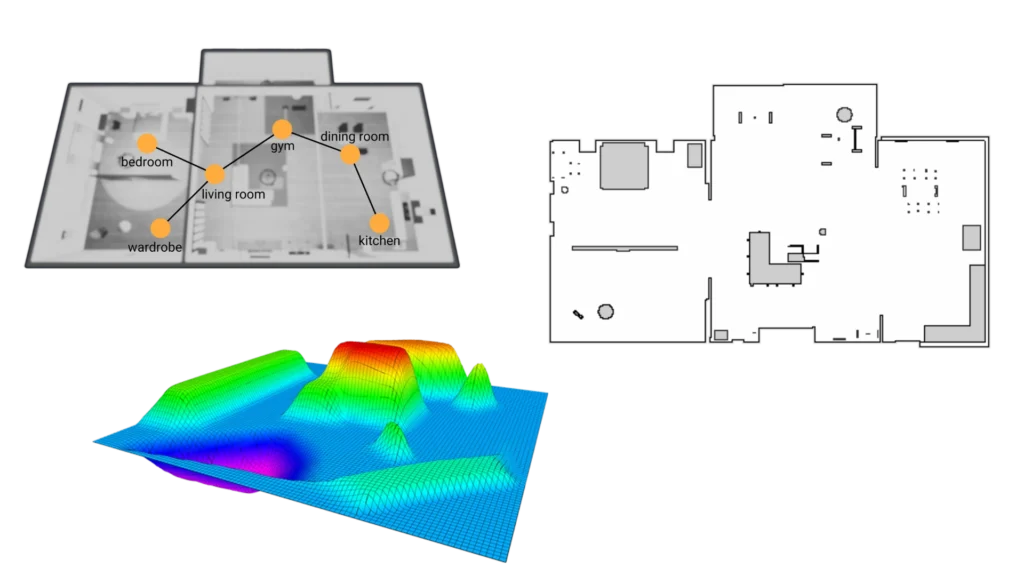
Representation of the environment as the robot perceives it.
Explore how robots represent their surroundings to navigate safely and efficiently. Learn about the different map types used in robotics — from occupancy grids and topological maps to 3D elevation maps — and understand how each impacts localization, planning, and perception.
Learn how robots map unknown environments while tracking their own position using Simultaneous Localization and Mapping (SLAM) — one of the most powerful concepts in robotics.
Master both the theory and practice of mapping, from 2D occupancy grids to 3D SLAM systems, and understand how to integrate sensors, motion models, and data fusion to create reliable and consistent maps in ROS 2.
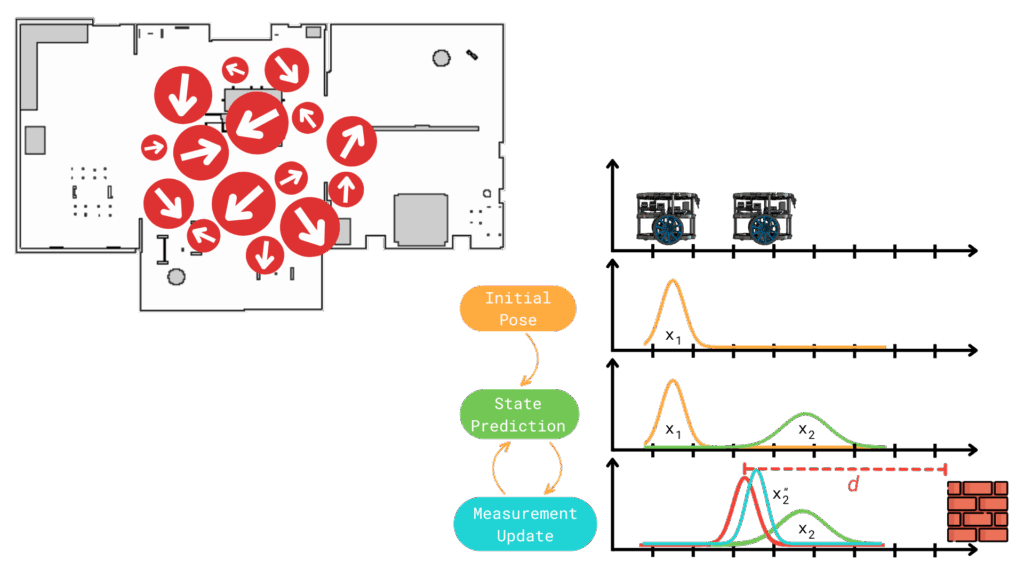
Discover how robots estimate their exact position using Particle Filters, one of the most widely used probabilistic localization techniques in modern robotics. Learn how to represent uncertainty with thousands of particles and update them dynamically as the robot moves and senses the environment.
You’ll gain a deep understanding of how algorithms like Monte Carlo Localization (MCL) work under the hood — and implement them in ROS 2 to achieve robust, real-time localization in complex environments.
Learn how to bring ROS 2 out of the screen and into the real world by integrating it with Arduino to control motors, sensors, and actuators.
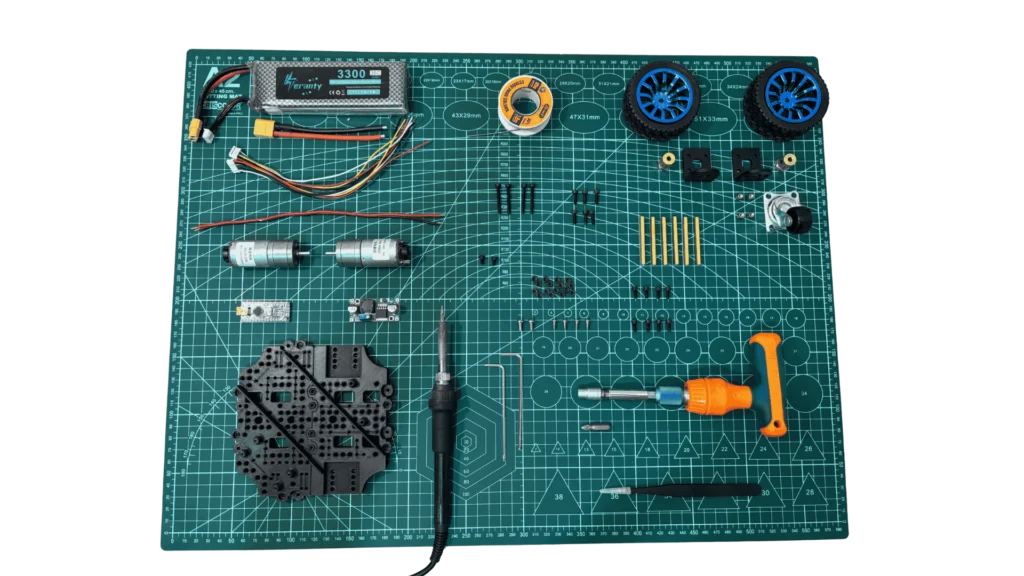
Follow step-by-step instructions to assemble your own autonomous mobile robot, wire its components, and establish smooth communication between hardware and software.