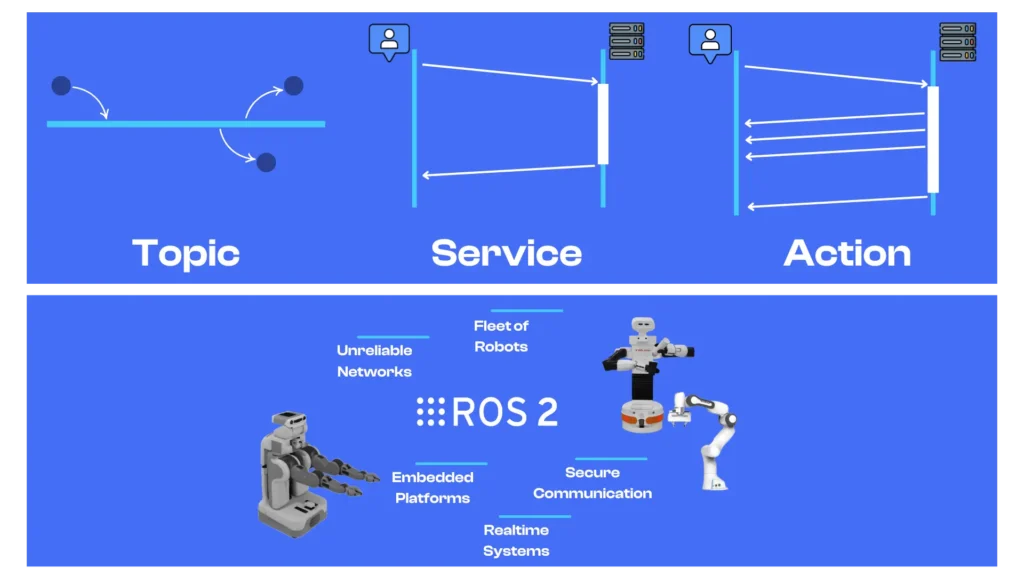
Get started with ROS 2, the latest version of Robot Operating System!
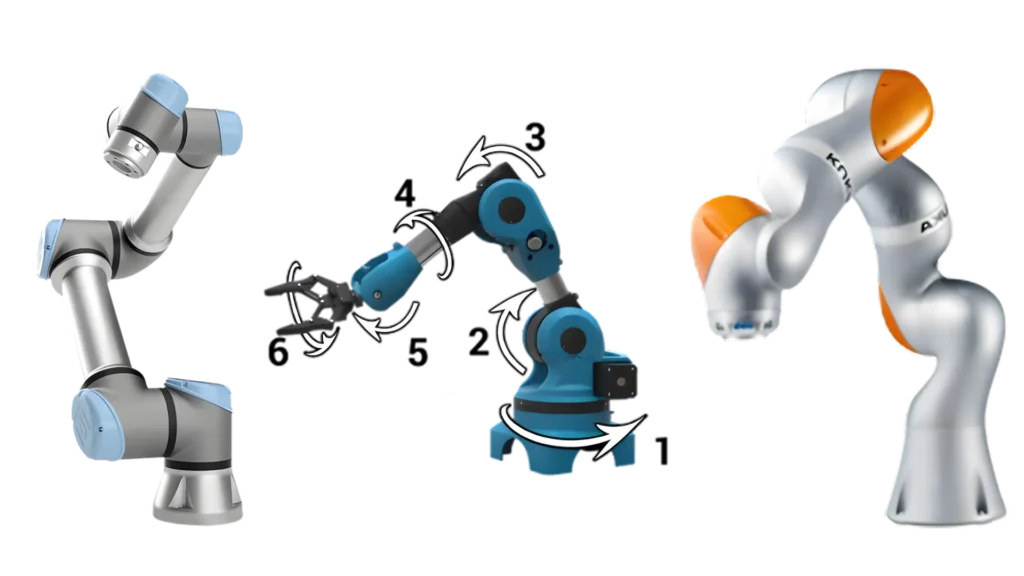
ROS is the most widely used framework for building all kinds of robots, from Manipulators, Autonomous mobile robots, Humanoids and Quadrupeds.
You won’t just learn theory! You’ll get your hands dirty, setting up a professional development environment and understanding the core concepts that power today’s most advanced robotic systems.
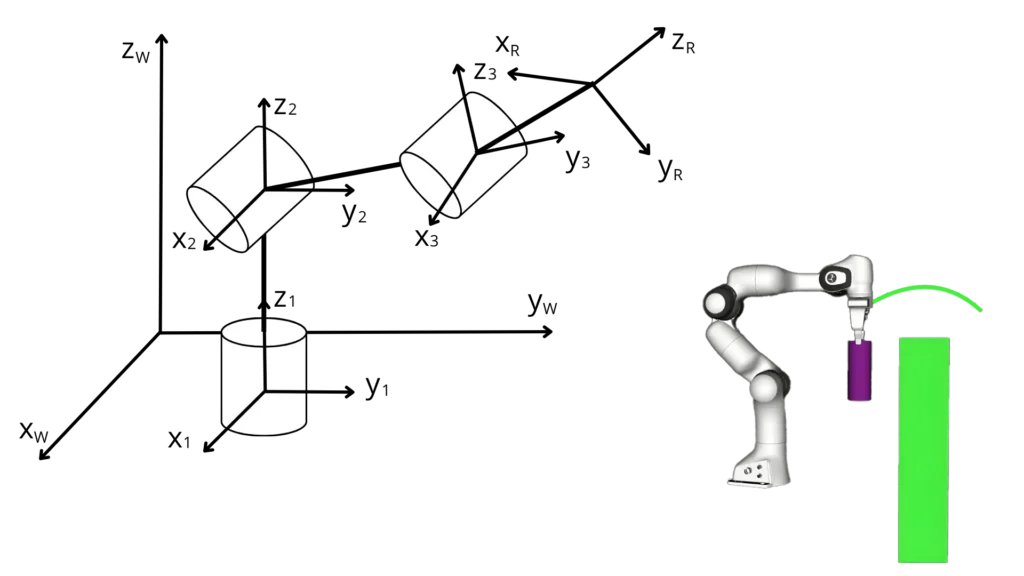
Create a high-fidelity virtual model of a robotic manipulator from scratch using URDF, the standard format for describing robot models.
Master professional tools such as RViz for 3D Visualization and Gazebo for the physical simulation of your robot. They enable you to easily and rapidly test new algorithms and fix bugs, all without leaving the development environment on your PC.
Unlock the full potential of your manipulator with MoveIt 2, the standard motion planning framework in ROS 2.
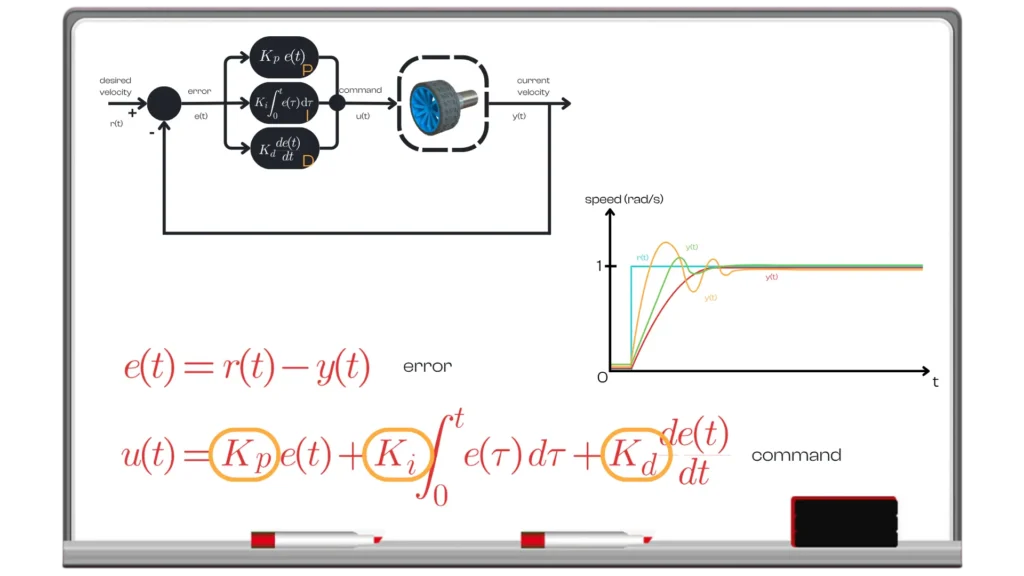
Learn how to plan smooth, collision-free trajectories and execute them with precision and confidence.
Understand the entire motion pipeline — from target pose generation to path optimization — and see how MoveIt 2 integrates perception, planning, and control into one powerful system.
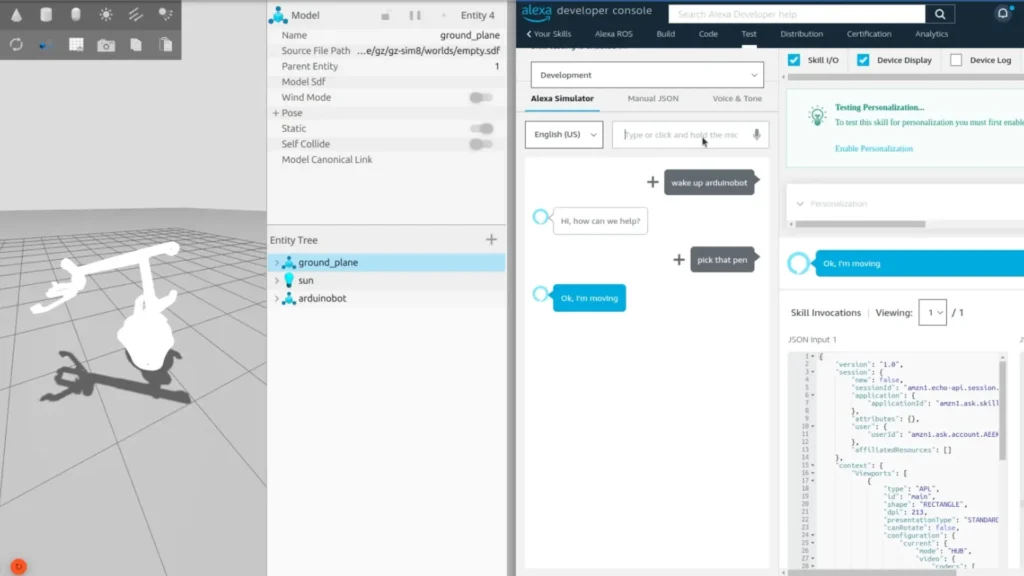
Learn how to send voice commands, enabling your manipulator to act on spoken instructions in real time.
Understand how to build the communication bridge between the cloud and your robot, making it possible to control complex robotic behaviors with simple, intuitive voice commands.
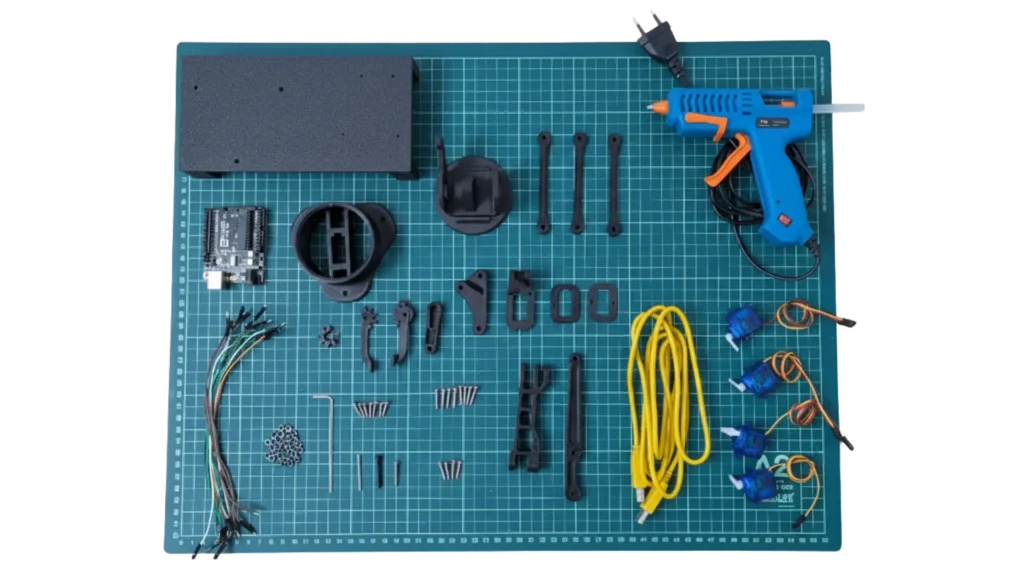
Learn how to bring ROS 2 out of the screen and into the real world by integrating it with Arduino to control motors, sensors, and actuators.
Follow step-by-step instructions to assemble your own manipulator, wire its components, and establish smooth communication between hardware and software.