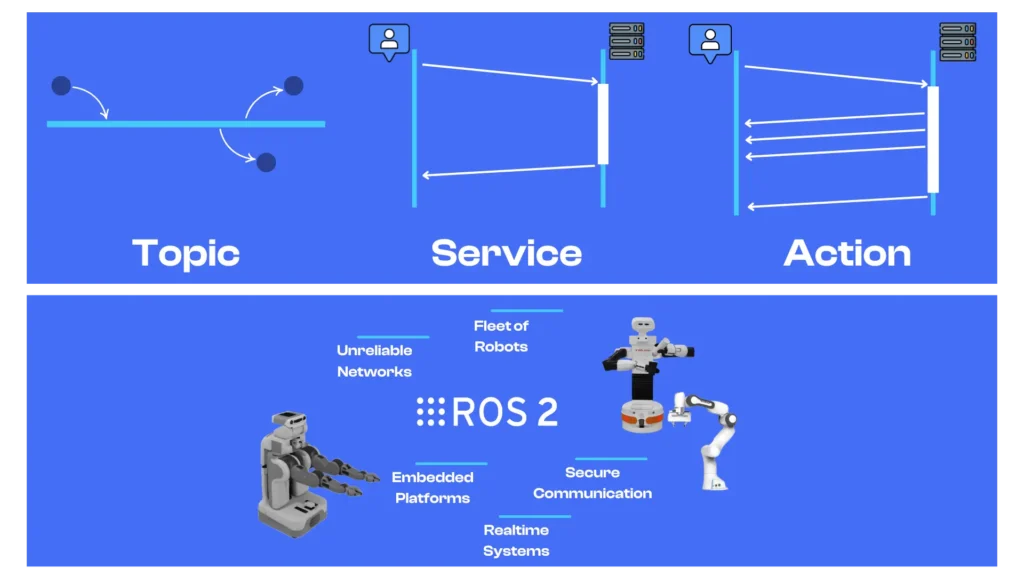
Get started with ROS 2, the latest version of Robot Operating System!
ROS is the most widely used framework for building all kinds of robots, from Manipulators, Autonomous mobile robots, Humanoids and Quadrupeds.
You won’t just learn theory! You’ll get your hands dirty, setting up a professional development environment and understanding the core concepts that power today’s most advanced robotic systems.
Create a high-fidelity virtual model of an autonomous mobile robot from scratch using URDF, the standard format for describing robot models.
Master professional tools such as RViz for 3D Visualization and Gazebo for the physical simulation of your robot. They enable you to easily and rapidly test new algorithms and fix bugs, all without leaving the development environment on your PC.
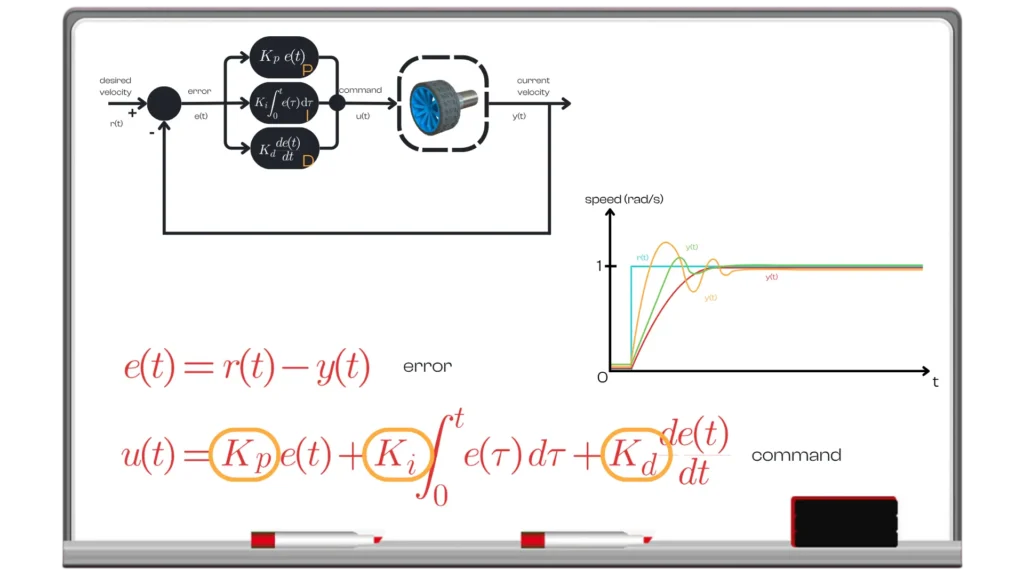
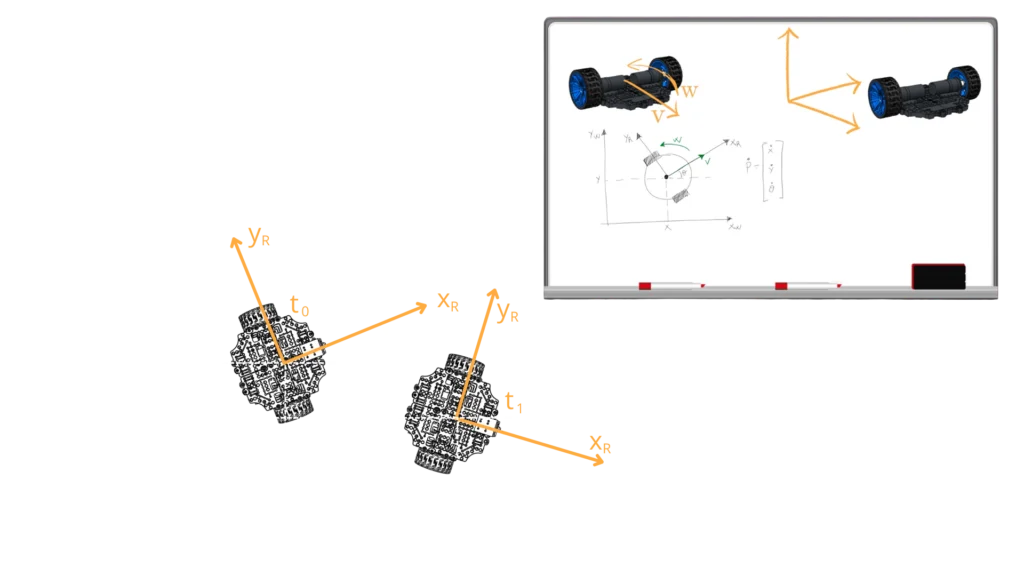
Master the foundations of mobile robotics by learning how robots estimate their position and orientation in the world.
Dive into wheel odometry to compute motion from encoder data, and discover how to combine it with advanced localization techniques for accurate navigation.
Visualize your robot’s position in real time, understanding the effect of noise in the sensor’s measurement and in the robot’s localization.
Understanding the role of probability in robotics is key to making them think intelligently.
Learn how to model uncertainty, estimate states, and make decisions when data is incomplete or ambiguous.
From basic probability distributions to Bayesian inference, you’ll gain the mathematical intuition that powers localization, mapping, and sensor fusion in modern robotics.
Combine data from multiple sensors to create a single, accurate understanding of your robot’s environment. Learn how Sensor Fusion and Kalman Filters work together to reduce noise, correct drift, and improve the reliability of your robot’s perception.
Implement filters that merge sensors’ readings, such as IMU and wheel odometry, providing a better, more reliable estimate of the robots’ position.
Learn how to bring ROS 2 out of the screen and into the real world by integrating it with Arduino to control motors, sensors, and actuators.
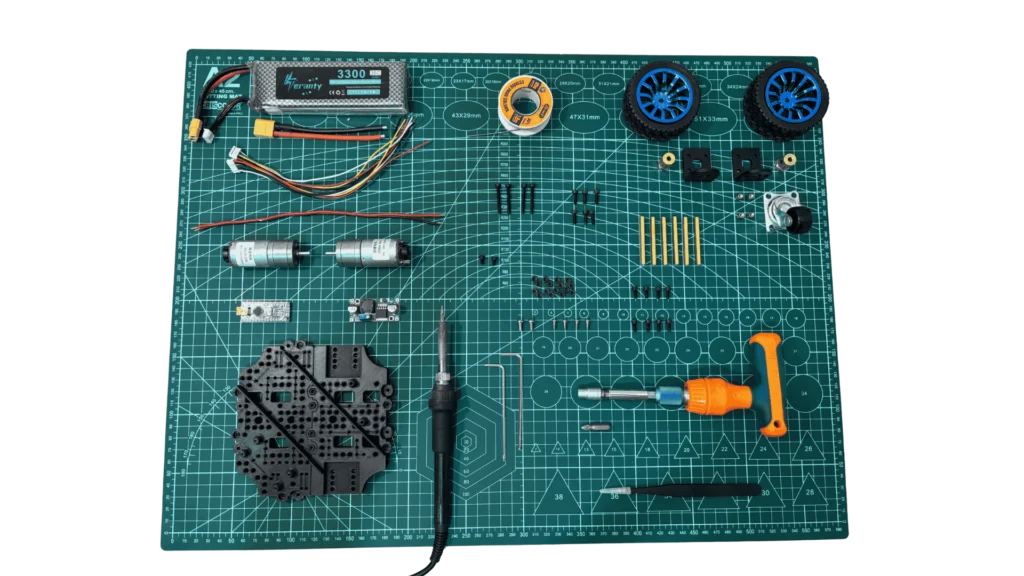
Follow step-by-step instructions to assemble your own autonomous mobile robot, wire its components, and establish smooth communication between hardware and software.